

 开关磁阻电动机具有许多优点,包括低成本和低能源使用。然而,它们的主要缺点是它们难以控制。这是由于各种原因。
开关磁阻电动机具有许多优点,包括低成本和低能源使用。然而,它们的主要缺点是它们难以控制。这是由于各种原因。
即,它们需要高度精确的位置跟踪,电机的电感随着它们的杆子的对准程度而变化;他们需要单极驱动器,它们往往会产生大量的可听噪音。
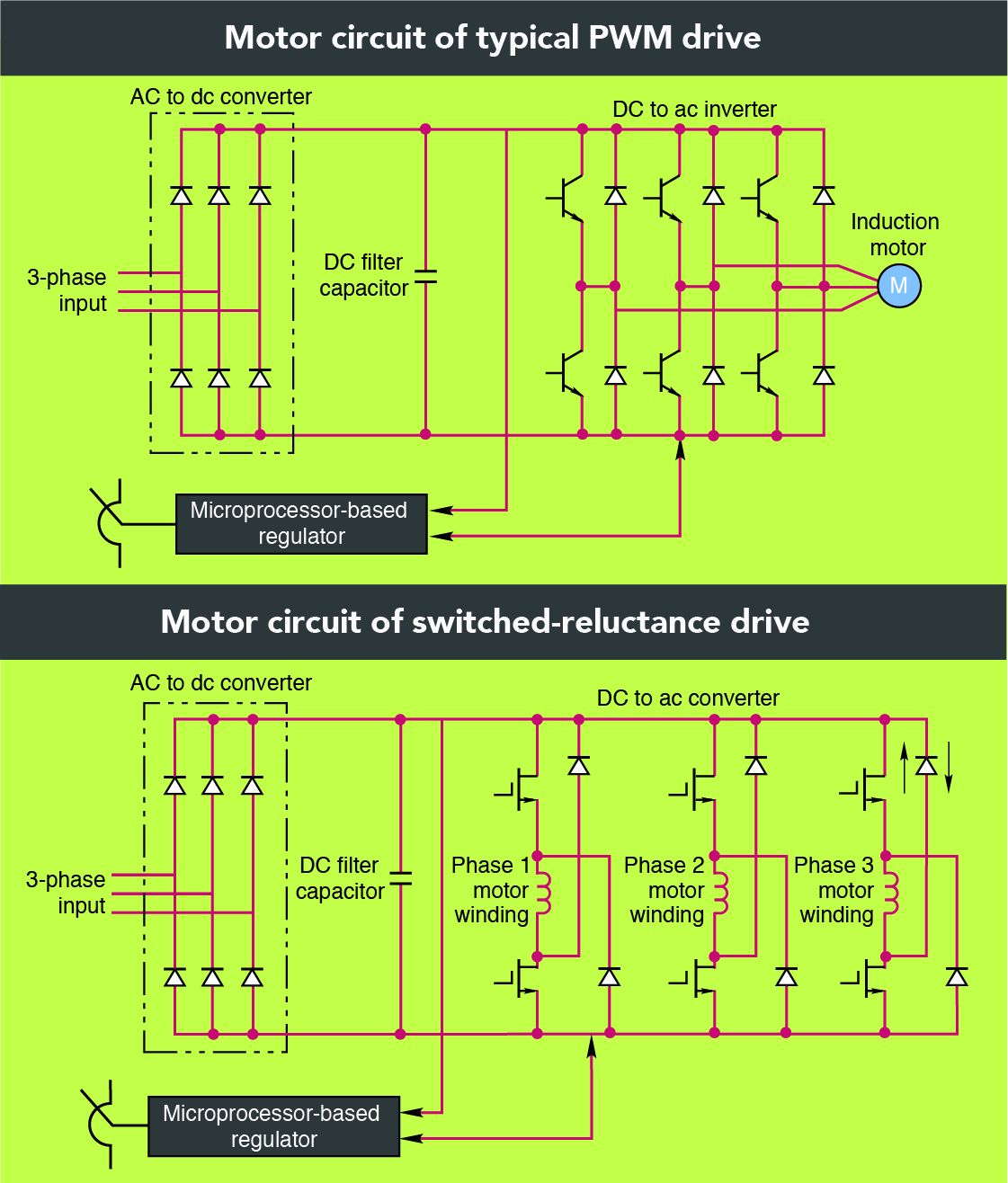
SRM的驱动器必须是单极的。这意味着每个阶段需要互补开关和二极管切割者。这意味着两倍的组件。虽然常规的膝步机可以使用两个设置的驱动器的单极和双极配置,但是SRM没有这样的选项。
点击放大。
电机感应的变化是另一个问题。由于开关磁阻电机的工作方式,随着磁阻的变化,电感也随之变化。因此,当电机旋转时,定子绕组中的电感会发生变化。这意味着将正确的电流发送到每个绕组是困难的,因为要发送的确切数量是不断在流动的。由于磁感应的变化,转矩波动也是一个问题。这可能会导致振动,甚至负扭矩,甚至在不需要或不需要时产生能量再生。
因为电感是不断变化的,转子的位置必须精确跟踪,以补偿这一点。这是这样的驱动器和控制器可以处理任何潜在的再生能源和补偿扭矩波动。精确的位置跟踪引入了更多的组件到系统中,并需要一个反馈回路。
可听见的噪音是srm面临的另一个控制难题。一些噪声来自振动和扭矩波纹,但还有另一个来源。定子和转子由于它们之间的磁力相互吸引。当转子转动时,这发生在每一个极。通常有两种解决方法;一种方法是简单地使用较厚的柔性材料,使定子更坚固。然而,这引入了费用和重量。另一种方法是跟踪转子的位置,用少量电流激活与当前有功对相反的线圈,以抵消吸引力。然而,这又需要精确的位置跟踪。
这些控制困难可能使得SRMS在许多应用中的非启动时。然而,随着技术的改进和更新的控制方法,开关磁阻电机可能成为一个更加可行的选择:常见问题:如何推动推动开关的磁阻电机更常见?有关更多信息。
提交:运动控制技巧


