

TRINAMIC运动控制GMBH&Co. KG的现在销售的TMCM-6214,能够驱动多达六个两相步进电机,拉丝高达1.9A的高度集成的模块RMS每个在高达的电源电压到24 V.由于它的三个增量A / B / N个编码器集成编码器输入,它可以支持高精度位置反馈三其六个马达,使得它适合于在实验室和工厂自动化,生命科学,机器人技术,测试和多轴应用测量和应用程序处理的贵重物品和液体。
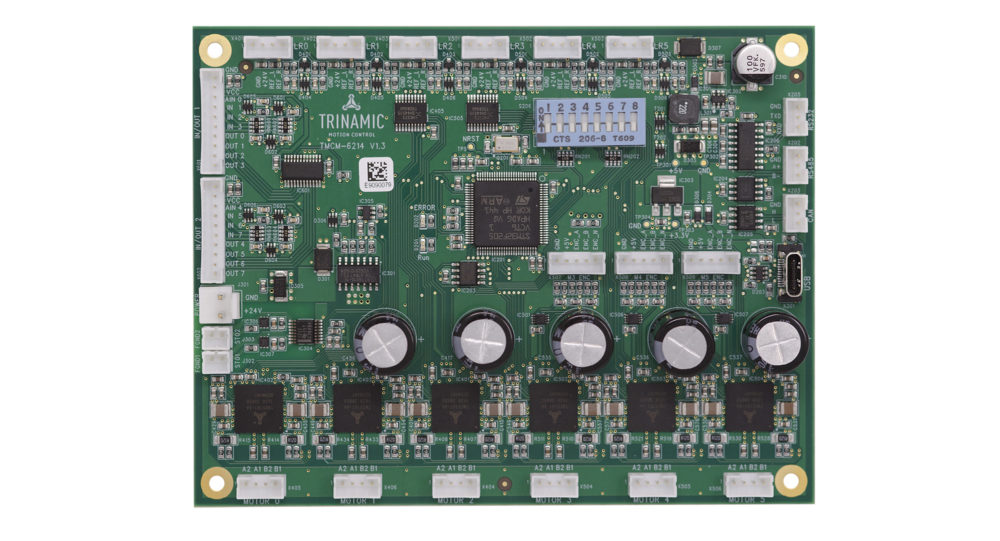
这是Trinamic的TMCM-6214。具有六点斜坡轮廓和多个编码器输入,TMCM-6214六轴电机控制器/驱动板的两相步进电机简化了机器人的设计,工业自动化,和其他先进的多轴运动控制系统。
“通过监控电机和中继反馈回操作,客户可以密切跟踪他们的应用程序的性能。很容易使客户能够使用这些功能使他们能够实现各种各样的应用。控制器的位置反馈功能,例如,可用于实现预测性维护功能,可显着降低设备停机时间,同时提高其整体寿命,”国家迈克尔·兰德,TRINAMIC的创始人兼首席执行官。
TMCM-6214的先进特性使工程师为其应用程序增加了一层额外的可靠性,同时确保在其延长的使用寿命中获得最佳性能。该控制器还集成了Trinamic的行业独有的DcStep功能,使步进电机能够模拟直流电机的特性,在较低的速度下提供更高的扭矩。类似地,Trinamic独特的SixPoint斜坡剖面允许开发人员创建复杂的加速/减速剖面,精确地定制他们的应用程序的需求。
为了提高易于集成的TMCM-6214是两个版本。第一个版本支持TRINAMIC的TMCL运动控制命令语言。
注意,TMCL (Trinamic运动控制语言)是一种专门用于运动控制应用程序的编程语言。TMCL包括以特定速度或特定位置移动一个或多个电机轴的命令,以及设置所有相关运动控制器参数的命令。TMCL还提供对其他通用数字和模拟输入和输出的访问。TMCL可用于大多数带有集成运动控制器的Trinamic模块。
与反馈设备的完全远程控制是可能的,该模块的TMCL固件可以通过任何串行接口进行更新。作为替代的TMCL版,TMCM-6214还带有固件支持工业标准CANopen通讯协议。
CANopen是用于自动化嵌入式系统的通信协议和设备配置文件规范。对于OSI模型,CANopen实现了上面的各个层,包括网络层。CANopen标准由一个寻址方案、几个小型通信协议和一个由设备配置文件定义的应用层组成。
该模块支持CAN,RS485,RS232和USB通信接口。控制器模块的两个版本都设有6个通用数字输入和两个模拟输入。该模块还具有可用于诊断8个保护的通用输出。集成电源开关是具有两个硬件断开扭矩输入沿着可用在一起。控制器强大,集成处理器有助于通过执行所有时间关键的操作,如斜坡计算,板上而不需要外部主机的协助最小化通信业务。
在TMCM-6214的两个版本将可以通过TRINAMIC的正常销售渠道在五月底。
功能和优惠:
- 用于两相双极步进电机的六轴控制器/驱动器
- 线性和六点斜坡
- + 9V至30V DC电源电压
- 高达1.9A RMS电机电流
- RS485、CAN、RS232、USB接口
- 3×A / B / N编码器输入
- 多用途的输入和输出(被保护)
- 硬件转矩关闭,集成电源开关为驱动电源
- 车载电压稳压器(+5V和+3V3),供所有车载数字电路使用。
TRINAMIC运动控制开发了世界上最复杂的运动和电机控制应用技术,使其简单如1-2-3。最先进的集成电路、模块和机电一体化系统使当今的软件工程师能够快速可靠地开发高效、平稳、安静地工作的高度精确的驱动器。Trinamic总部位于德国汉堡,在爱沙尼亚塔林设有研发中心,并在美国伊利诺伊州芝加哥和中国苏州设有销售工程师。
欲了解更多信息,请访问在trinamic.com的TMCM-6214产品页面.也下载数据表(作为PDF)上市规格的马达控制器/驱动器板。
提交:运动控制技巧那电机•步进



告诉我们你的想法!