

经过唐格拉莫拉P.E.,Quicksilver Controls,Inc
随着人们对混合伺服系统控制技术的了解,混合伺服系统的使用越来越多,而足够处理功率的成本也随之降低。
复杂的控制技术已经通过开环步进驱动器供电时,通过通常称为混合步进电机的电机风格产生混合伺服电机系统。结果是高扭矩能力,速度扭矩范围良好匹配,直接驱动带和铅螺钉以及其他负载。
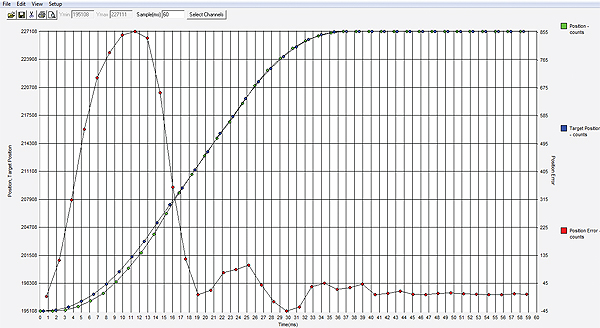
先进的控制和阻尼增强技术允许开箱调频处理约95%的应用,覆盖开轴约3至5倍的惯性不匹配,而无需重新调整驱动器。通过一些额外的调优(通常需要几分钟),很容易实现100:1的惯性不匹配。一个由直接驱动带式直线驱动器组成的示例系统,使用24帧混合伺服操作,能够在无负载至11公斤(25磅)的情况下运行,调谐或运动没有变化。这相当于约1:1到22:1的惯性不匹配,同样没有返回。
混合动力车电机的短暂历史
高柱数,混合横向电动机现已走了全圈。名称中的术语混合是指通过可变磁阻和通过与永磁体反应而产生扭矩的产生。横向是指该电动机的三维性质,磁场轴向偏振。
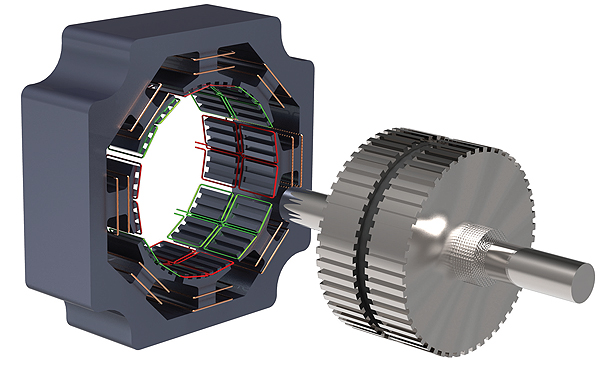
这台发动机以不同的名称至少可以追溯到1957年的美国。专利2982872。(专利原图的一部分可以在这两页的背景中看到。)它起源于一个两相电机,所以它可以驱动作为分裂相同步电机从单相交流线:一相直接连接到60hz线,另一相通过使用串联RC电路移动。为了平滑,这个早期专利描述了48:50的定子与层压齿间距比。在后来的历史中,这种独特的电机在步进模式下运行(美国专利3,343,014),使用重叠脉冲代替原始的正弦和余弦波形。采用50:50的动静齿比来提高全步操作的精度。最终,创建了半步和不断提高的微步分辨率。电机定子-转子齿比返回到48:50或52:50的基本比率,以实现更好的微步进。驱动波形已经改进到这一点,他们现在做了很好的近似的原始正弦波使用这种电机风格。 Finally, closed-loop control has been added to control this high-pole synchronous motor as a true brushless servomotor. Hence, the hybrid servomotor.
驱动器确定操作:打开循环=步进器
混合伺服电动机具有高连续扭矩和低制造成本的益处,但与其他电机的实际性能和操作相比,强烈依赖于附带的驱动器。
与3相电机一样,连接的电子设备确定操作。当用典型的步进驱动器操作时,通常使用峰值电流检测或HySteric模式来控制电流。如果驱动电压足够高于电动机的后弧度,则电流趋于遵循命令电流并且与电动机运动相当独立。由于电流不会被运动(特别是较低速度)显着修改,因此纯电流模式驱动器提供很少的相互作用,因此仅提供轻度阻尼。低阻尼导致强大的低速共振(其伴随的扭矩下降)和运动结束时的长稳定时间。
一个典型的1.8°电机有100个磁极,每转50次电循环。当用恒定的驱动电流通电时,电机在旋转时产生一个正弦变化的扭矩。不同的相电流组合会抵消零点旋转角度。使用高磁极计数既增加了峰值扭矩值,又减少了从最大正扭矩到最大负扭矩所需的机械角度。由此产生的扭矩与位置特性(扭矩刚度)是使这种类型的电机适合开环定位的部分原因,因为即使是一个很小的误差角,也会导致扭矩的显著变化,这与产生误差的扭矩相反。
这种电机的强转矩与误差角特性也引起了谐振问题,当这些电机是开环运行时。电机转子惯性作用于正弦校正力矩形成一个旋转摆。对于小角度,可以认为这是一个k-Theta旋转弹簧耦合到转子组件的第二惯性矩。由此产生的相互作用引起共振,从而降低共振频率附近的可用扭矩,并可能使电机粗放运行,失去位置,甚至一起停止运行。当运动停止时,同样的共振设置了振铃特性。请注意,弹簧常数是转矩常数乘以励磁电流的函数。改变电流会改变有效弹簧常数,从而改变谐振频率。这种效应可以被有意地用来试图避免共振,也可以意外地发生与驾驶员的公差或温度变化,导致一些机制运行正常,而另一些则失败。
系统阻尼
系统中的阻尼降低了共振的振幅,影响了运行扭矩下降和停止时的振铃。这可以通过机械和电子手段来实现。粘性惯性阻尼器通过粘性油将飞轮与转子轴耦合在一起。改变电机轴的转速会使减振器壳体和飞轮之间的油发生剪切,导致飞轮慢慢地与轴(即减振器壳体)的转速匹配。当飞轮和轴的转速不同时,油会散热。系统的振荡引起轴速的周期性变化。有了适当选择的阻尼器——有足够的惯性和适当的油粘度来设定所需的工作频带——很大一部分的振荡可以被阻尼。这些阻尼器非常有效,但它们占用空间,增加重量,增加了系统的惯性,必须由电机加速。高质量的设备也相对昂贵。使用摩擦磁铁阻尼器可以降低成本,但其性能不如粘性阻尼器,并且可能会引入灰尘(金属颗粒)。
改变电流作为速度的函数可以产生电子阻尼。早期的例子使用额外的一组线圈在电机上作为速度传感器。来自这个传感器的信号被用来修改所要求的电流波形。随着速度传感器信号作为电机反电动势的代理,这有效地降低了驱动器阻抗,从非常高的纯电流驱动器显著降低,这允许旋转振动耗散到驱动器电路。与线路连接的同步电机的驱动电压源的低阻抗有助于抑制这些电机,因为超过的速度会产生功率进入线路,而滞后位置则会吸收额外的功率。这种低阻抗驱动的效果可以很容易地通过缩短步进电机的引线和尝试转动轴看到。
闭环:换向
步骤丢失避免用于某些“闭环”产品 - 此处的引号表明,是否应避免逐步抵消避免闭环并非一般协议。电机通常跟随开环轨迹发生电动机角度而不是基于电机位置换通电动机。当电机位置误差从命令位置达到大约±90电量(一个完整步骤)时,来自轨迹发生器的角度被约束,以遵循电机能够执行的,而不是最初命令的轨迹;只有在这些情况下,避免行为换消。步骤损耗避免防止步骤丢失,但实际上并没有消除电机共振。它还不会最大限度地提高电机效率,导致电动机更热。虽然确实消除了调谐的需要,但是翻盖的是它没有用于阻尼和调谐的规定,并且通常不允许扭矩控制。
无刷换向随着电动机位置的函数而变化绕组激励的相位。对于位置控制系统,这通常需要某种类型的转子位置反馈。换向基于转子位置和指挥扭矩将正弦和余弦电流波形(或截断版本)应用于电动机绕组。可以修改这些电流波形以处理更高速度的场弱,并且还可以被修改以补偿电动机扭矩纹波以及齿槽扭矩。
低频谐振消除
这种电机的正弦换向的使用最大限度地减少了转矩作为转子位置函数的变化(给定的命令转矩保持恒定)。假设理想的恒力矩,k-theta“弹簧”已经被一个恒力“弹簧”所取代。钟摆不再有恢复力,所以它不振荡。这通过将二阶振荡系统简化为一阶系统来消除低频共振。消除谐振后,扭矩不再下降,电机运行更加平稳。
混合伺服
混合伺服器是混合横向电动机作为无刷伺服服务的演变。混合伺服从传统的低极数无刷交流伺服伺服伺服物质变化:1)杆数量,2)通过使用2相与3阶段,3)峰值到连续扭矩。理想情况下,两者都是使用位置传感器(用于定位操作)的正弦换向。混合伺服伺服速度的较高磁极计数为扭矩进行速度。在比较两个电动机类型时,给定磁隙强度,速度随着极数的线性而下降,并且扭矩由相同的因子上升。这通常被称为“磁力传动装置”。各种纸张已经表明,类似设计的2-和3相电动机的扭矩密度和损耗是相同的 - 无论如何都没有优势。在无刷电机的早期,3相电动机具有两个电源开关的优势,但随着电子设备的成本,这不再重要。
低极数电机通常设计有更大的气隙,在磁结构饱和之前允许更高的电流密度。更大的间隙也需要更多的磁性材料来产生给定的间隙磁场强度,增加了成本。最终的结果是,这些电机类型可能最大低速转矩能力基本相当,但极低版本通常只能维持这个峰值扭矩几秒钟由于大电流加热(10 x连续额定电流产生100 x电阻加热)。在额定电流下运行的高极计数版本可以在连续的基础上保持类似的扭矩水平。
控制系统功能
控制系统基于实际和测量位置以及速度和加速来确定所请求的扭矩。速度和加速度(使用时)通常从该位置衍生(估计),尽管更高的性能系统可以补充具有单独的传感器。
电子阻尼模拟粘性惯性阻尼器
除了传统的控制术语之外,可以将额外的阻尼方法添加到系统中。QuickSilver控件方法包括主动和被动阻尼。有源阻尼算法是对系统上粘性惯性阻尼器效应的实时模拟。这可以显着提高系统的相位裕度在几个带宽八度的八位八个八位八位。额外的阶段裕度可以在仍在最小化过冲的同时进行更高的调谐增益。
由于分辨率,带宽限制和处理延迟,合成(模拟)粘性阻尼器不提供从机械版本的全相位提升。然而,模拟阻尼器在无增量成本下显着提高系统性能,没有增加重量或体积,没有增加的系统惯性。它不会磨损,很容易调整。
驾驶员阻抗控制
被动阻尼实现为作为频率函数的驱动器输出阻抗改变驱动器输出阻抗的算法。较低的频率操作仿真电流模式,而较高的频率被处理为电压模式。这在用于控制正常运动的频率范围内产生良好的扭矩控制,同时显着阻尼与电机轴扭转共振相关的更高频率能量。这再次允许更高的控制获得更高的控制,同时仍然具有良好的阻尼和稳定性。
Quicksilver Controls,Inc。
www.quicksilvercontrols.com
提交:运动控制技巧那驱动器(步进)+放大器



