

传感器融合是将两个或多个传感器的输入相结合,以生成更完整、准确和可靠的环境图像的过程,特别是在动态环境中。传感器融合的目标是用最少的传感器数量和最少的系统复杂度以最低的成本提供改进的结果。的以前的常见问题解答在本系列中回顾了传感器融合的基础知识。本FAQ深入探讨了传感器融合的各个层次,并研究了用于传感器融合系统的不同架构。
在最基本的层面上,根据所使用的数据类型、来自传感器的原始数据、从传感器数据中提取的特征,以及利用提取的特征和其他信息做出的决策,将传感器融合分为集中式和分散式。根据实现的不同,传感器融合可以提供以下几个好处:
- 增加数据质量
- 增加了数据的可靠性
- 未测量状态的估计
- 增加覆盖区域
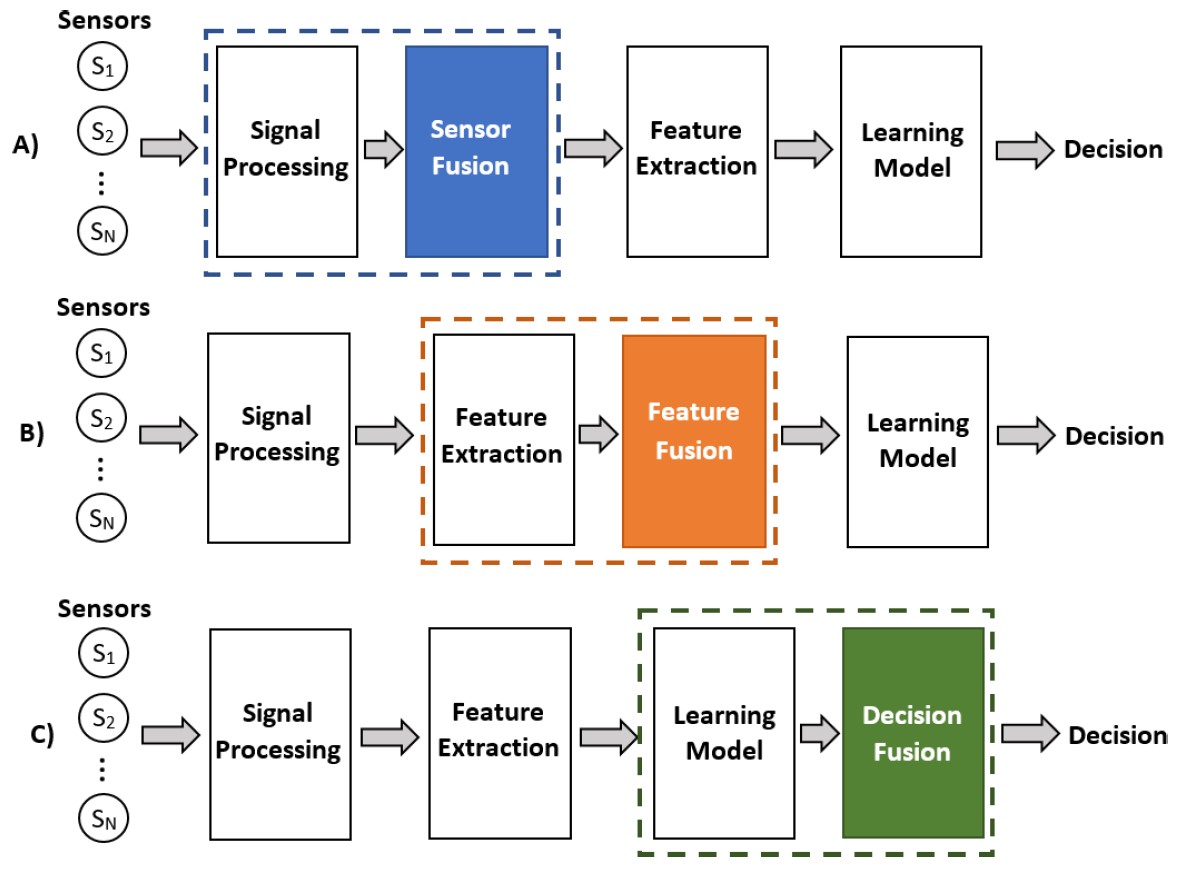
传感器融合是数据融合的一种形式,使用相似的统计、概率、基于知识和推理/推理方法。可以使用协方差、交叉方差和其他统计方法。概率方法包括卡尔曼滤波、最大似然估计、贝叶斯网络等。人工神经网络、模糊逻辑和机器学习算法都是基于知识的推理和推理方法。传感器融合通常包括三个层次的抽象:
- Sensor-level抽象处理原始传感器数据。如果使用多个传感器来测量相同的物理属性,则可以将数据合并在此级别。对于测量不同属性的传感器,数据在更高的层次上进行组合。
- 功能水平摘要从各种独立的传感器中提取特征,以产生独立的特征向量表示。
- 决策水平抽象对各种特性进行分类,并使用产生的数据对环境做出决策,并确定需要执行的任何必要操作。
每个数据/传感器融合范式(统计的、概率的和基于知识的)都可以在不同的处理抽象层次上使用。除了这三个基本层次之外,还可以实现混合模型。例如,来自两个不同传感器的数据可以组合成一个单一的特征集,并生成用于决策级别的分类模型。或者,多个模式的特征提取和决策级别分类的结果可以用于训练,以细化其他模式的决策级别分类算法。
传感器的来源分类
根据系统中多个传感器之间的关系,可以对传感器关系和传感器融合架构进行分类:
互补的传感器提供代表环境不同方面的信息,并可以组合起来生成更完整的全局信息。在互补实现中,传感器独立工作,彼此之间不直接依赖,但可以组合在一起,以给出观测现象的更完整的图像。例如,结合来自转速传感器和振动传感器的信息,可以提供关于电机和变速箱状况的增强信息。或者,在视觉系统的情况下,来自两个不同的摄像机或一个摄像机和激光雷达传感器的相同物体的图像可以组合起来提供更完整的环境“图片”。
冗余或竞争性传感器用于提供关于同一目标的信息,并将其输出结合起来以增加输出的可靠性或置信度。例如,如果两个相机的视野重叠,则重叠区域被归类为冗余感测。在竞争感测的情况下,每个传感器测量相同的财产;在两个相机的情况下,两者都将具有相同的视野。有两种竞争配置:来自不同传感器的数据融合;或者从在不同点测量的单个传感器中融合数据。在监控关键参数时,可以使用特殊的竞争传感器融合,称为容错融合。容错设计通常基于模块化设计,例如N + 1冗余架构。
合作传感器融合将来自多个传感器模式(如音频和视觉)的输入组合以产生比各个输入更复杂的信息。将两个具有不同观点的相机组合可用于综合环境的三维表示。合作传感器融合是复杂的,结果对所有包括传感器中的累积精度敏感。虽然竞争传感器融合可以提高精度和可靠性,但协作传感器融合可以降低精度和可靠性。

六层传感器融合
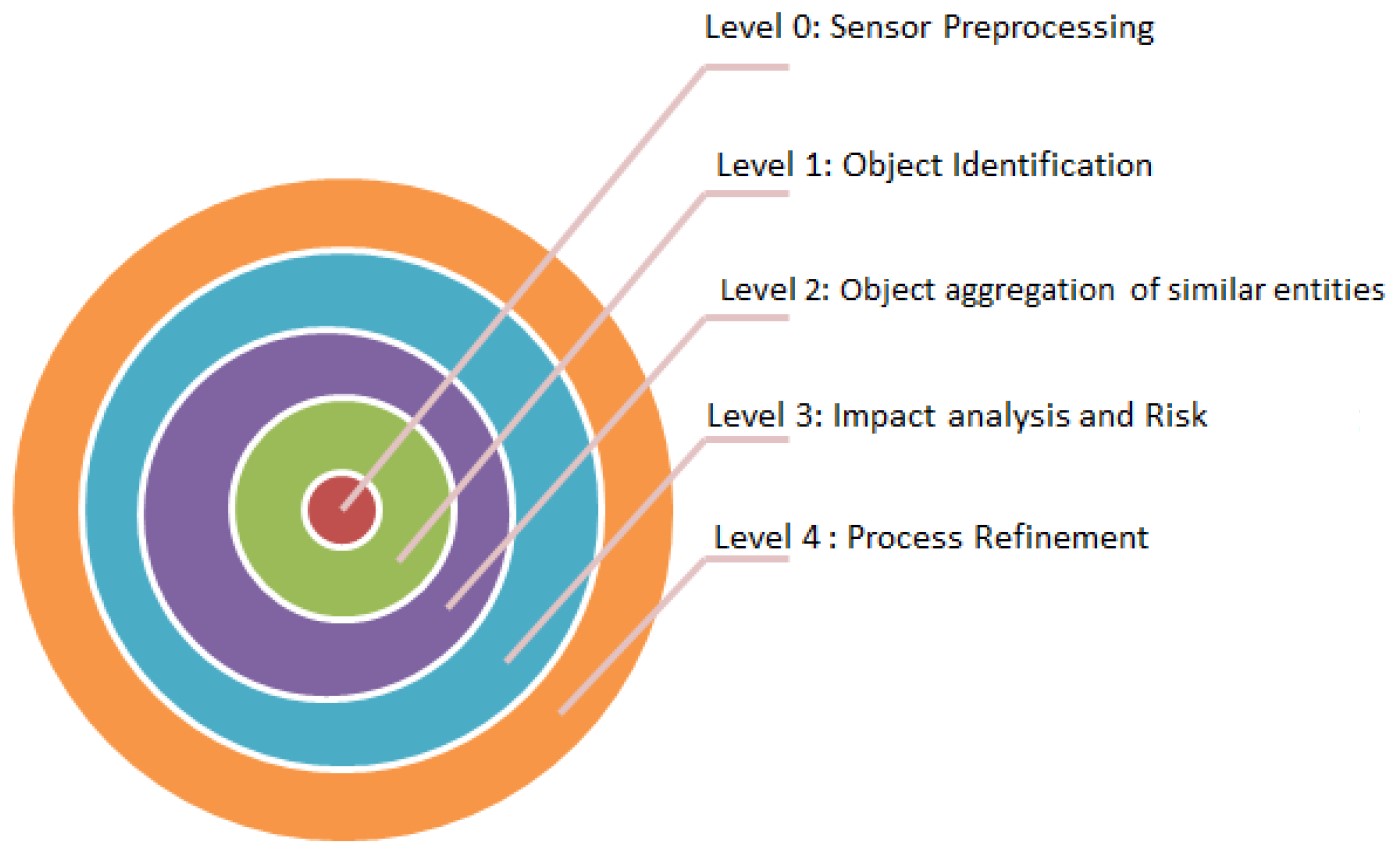
除了各种各样的传感器源分类外,还有六个公认的传感器融合“级别”。几十年来,数据和传感器融合一直是军事系统的一部分。美国国防部联合实验室主任(JDL)数据融合子小组开发了最重要的数据融合模型之一。JDL模型包含了五个用于融合方法的级别,包括:
等级0.- 源预处理是数据融合的最低级别。它包括信号电平的信号调节和融合。在光学传感器的情况下,它可以包括在各个像素的水平下的融合。预处理的目标是减少数据量,同时维护更高级别所需的所有有用信息。
1级- 对象细化使用前一级的预处理数据来执行时空对准,相关性,关联,聚类或分组技术,状态估计,伪阳性,标识融合的删除以及从图像中提取的特征的组合。对象细化导致对象分类和识别(也称为对象鉴别)。输出以一致的数据格式生产,可用于情况评估。
第2级-态势评估建立分类和识别对象之间的关系。关系包括邻近、轨迹和通信活动,用于确定物体与环境的关系。这个级别的活动包括重要活动、事件和任何总体模式的优先级。输出是一组可用于影响评估的高级推论。
3级-影响评估在第2级中评估被检测活动的相对影响,以支持情况分析。此外,还对未来进行了预测,以确定可能的近期漏洞、风险和操作机会。未来预测包括对威胁或风险的评估和对预期结果的预测。
4级-流程细化用于提高0到3级,并支持传感器和一般资源管理。最初,这是一个手动任务,以实现有效的资源管理,同时考虑任务优先级、调度和控制可用资源。虽然目标没有改变,但现代系统越来越多地使用人工智能和ML工具来补充人工分析。
IOT的传感器融合架构
如上所述,传感器融合发生在多个级别,包括传感器、特征和决策级别。就物联网而言,传感器融合也可以根据其在无线传感器网络中的传播方式进行分类。在单跳架构中,每个传感器都将数据直接传输到数据融合中心。星型网络结构是单跳实现的一个例子。在多跳架构中,来自一个传感器的数据在到达数据融合集线器的路上要经过相邻的传感器节点。网状网络是一种多跳结构。
多跳体系结构有几个优点。它可以支持可伸缩性,因为放置在网络的外边缘上的附加传感器仍然可以将数据传输到数据融合毂而不产生长传输距离的能量损失。在每个跳中使用逐行数据融合最大限度地减少了能量需求并在网络上传播了能量需求。并且它通过沟道状态信息和其他输入来预先确定和最小化所需的传输能量来降低能量消耗。

总结
传感器融合是一种数据融合的形式,并使用类似的方法。有多种方法可以对传感器融合的级别进行分类。有几种方法可以在给定系统中对传感器交互进行分类,包括互补,竞争(或冗余)和合作。多模态融合方法可以解决各个传感器的缺点,提高所产生信息的质量和准确性。无线物联网网络呈现出独特的挑战和机会,以最大限度地提高传感器融合实现的架构,以最大限度地提高能源效率。
参考文献
数据融合技术综述,后维
物联网调查:未来愿景、架构、挑战和服务, IEEE
物联网传感器数据处理、融合和分析技术综述, MDPI
面向智能无处不在环境的数据融合和物联网, IEEE
认知负荷客观评估的多模态融合, IEEE
传感器和数据采集,科学直接
提交:传感器提示



