

每种传感器类型或方式都有其固有的优点和缺点。传感器融合是将来自多个传感器的输入组合在一起,形成平台周围环境的单一模型或图像的过程。得到的模型更加精确,因为它平衡了不同传感器的强度。传感器融合将来自不同传感器模式的数据组合在一起,并使用软件算法提供更全面、因此更准确的环境模型。
本FAQ回顾了传感器融合的基础知识,考察了使用机器学习优化传感器融合算法的一个例子,考虑了传感器融合在工业物联网(IIoT)应用中的使用,并在最后考察了与传感器融合相关的标准化工作。本系列的后续faq将回顾传感器融合的级别和架构,传感器融合在机器人中的应用,最后概述传感器融合在陆地、空中和海上交通工具中的应用。
虽然传感器融合的最终目标是为平台周围的环境提供更准确、更全面的模型,但它还可以提供其他几个功能:
- 解决传感器之间的矛盾
- 传感器输出的同步,例如,通过考虑从多个传感器获得的测量值之间的短时间差异。
- 使用异构传感器系统提供大于输入之和的输出。
- 通过检测一个传感器是否一致地产生与其他传感器相比不太可能正确的输出来识别潜在的传感器故障。
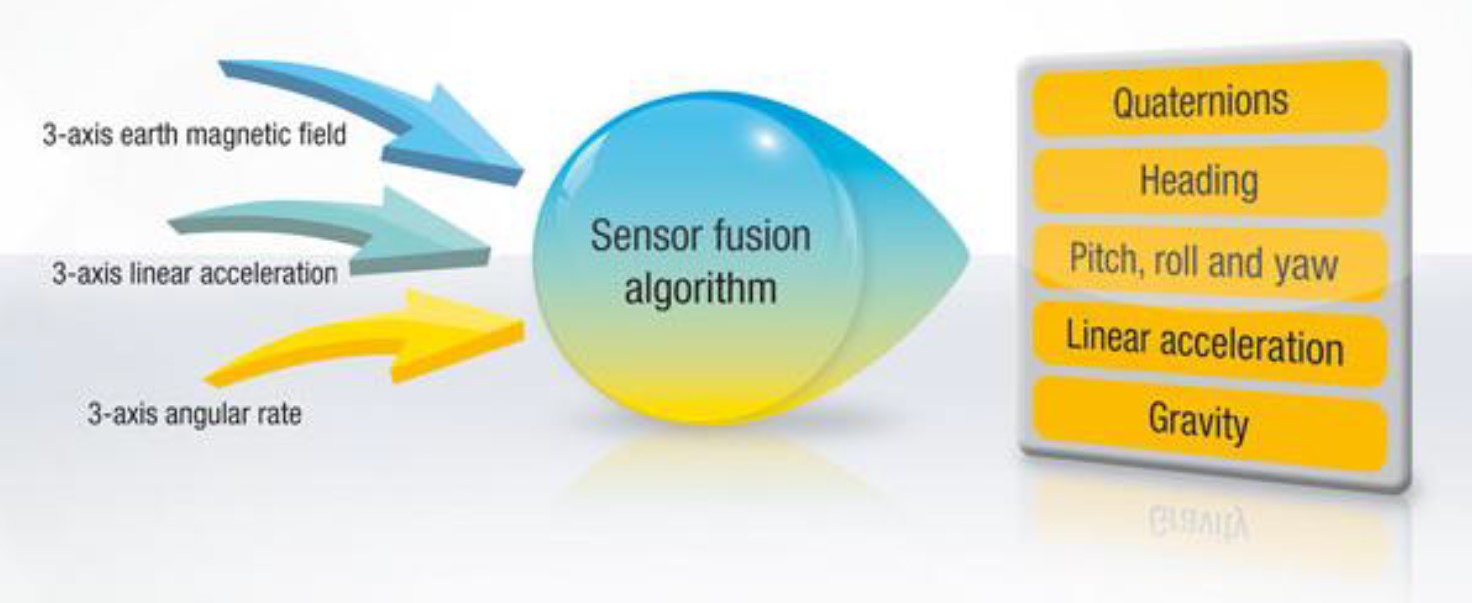
传感器融合可用于创建9轴定位解决方案,使自主平台能够做出更明智的决策,支持更智能的行动。陀螺仪、磁力计和加速器的组合可以提供每种传感器模式的所有优点,同时弥补各自的缺点:
- 陀螺仪跟踪瞬时航向、俯仰和横摇,不受横向加速度、振动或变化磁场的影响。不过,它并没有一个绝对的参考,而且可能随着时间的推移而漂移。
- 加速度计跟踪重力的方向,而磁力仪跟踪地球磁场的方向。两者都有一个绝对的长期参考,但容易受到加速度、振动和变化场的干扰。
传感器融合是一个复杂的过程,收集、过滤和聚合传感器数据,以支持智能决策所需的环境感知:
- 第一级包括从各种传感器和传感器集群收集的原始输入数据。
- 第二级包括滤波、传感器数据的时空同步和不确定性建模,比较各种传感器输出。
- 目标检测和特征提取,以生成对象的表示,如大小、形状、颜色、速度等,在第三级进行。
- 第4级汇总了第3级的输入,以识别特定对象及其轨迹(或预期轨迹),从而创建环境的准确动态模型。
提取和聚集特征是成功传感器融合的关键活动。正在开发机器学习(ML)算法以比较各种融合方法,并在特定应用中确定给定的传感器组的最佳解决方案。在一个情况下,ml雇用:
- 弗里德曼的等级测试,一个非参数统计测试,以检测多个传感器融合方法的输出精度的差异
- 霍尔姆的检验是通过调整每个假设的拒绝标准来确定一个或多个假阳性发生的概率。
这些测试可用于识别原始提取和聚合(定义为用于比较的基线)与其他更复杂的融合算法(如各种形式的投票、多视图叠加和AdaBoost方法)之间在准确性方面的显著差异。

IIOT传感器融合
传感器融合预计是最大化IIOT的效用的关键因素。传感器融合可以提供避免意外维护和意外停机所需的综合实时操作数据。传感器融合的使用之一是提供测量的上下文。例如,监控设备温度没有监测环境环境中的温度可能导致缺陷的结果。
将振动传感器与速度传感器相结合,可以提供关于电机和变速箱状况的更多信息。通过关联振动和速度数据,可以识别出单个传感器无法识别的轴不对中或轴承磨损。
更复杂的传感器可以同时用于分析多个操作参数。因此,工业物联网传感器越来越多地与两个、三个甚至四个不同的传感器封装在一个封装中。多个传感器的协同封装降低了系统的复杂性和成本,同时增加了传感器融合带来的好处。越来越多的物联网应用,包括可穿戴设备、医疗设备、无人机、白色家电、工业系统和运输,正在使用联合封装传感器来监测压力、温度、力、振动等。
传感器融合标准
传感器融合标准刚刚开始出现。以下是两个示例,一个用于传感器和传感器融合单元之间的车载接口,以及其他用于开发Ad-hoc传感器网络的其他示例,以填充传统传感器(如雷达,Lidars和摄像机)之间的间隙之间的差距通信网络。
需要各种传感器和传感器融合功能之间的标准化逻辑接口层来最大限度地提高各种传感器融合应用的可重用性,并最大限度地减少传感器/融合通信链路所需的开发时间。这是ISO 23150:2021的目标。该标准规定了融合单元之间的逻辑接口,该融合装置在使用环绕式融合模型和车载环境感知传感器等车辆周围解释现场,如雷达,激光雷达,相机和超声波。该接口在模块化和语义表示中描述。它提供了有关对象级别的信息(例如,可能移动对象,道路对象,静态对象)以及基于传感器技术特定信息的特征和检测级别的信息。ISO 23150:2021专注于界面级别2:
- 接口级别1是最高的逻辑接口,连接融合单元和自动驾驶功能。
- 接口级别2是中间逻辑接口,将传感器和传感器集群与融合单元连接(这是ISO 23150:2021的重点)。
- 接口层3是用于传感元件的原始数据层的接口层。
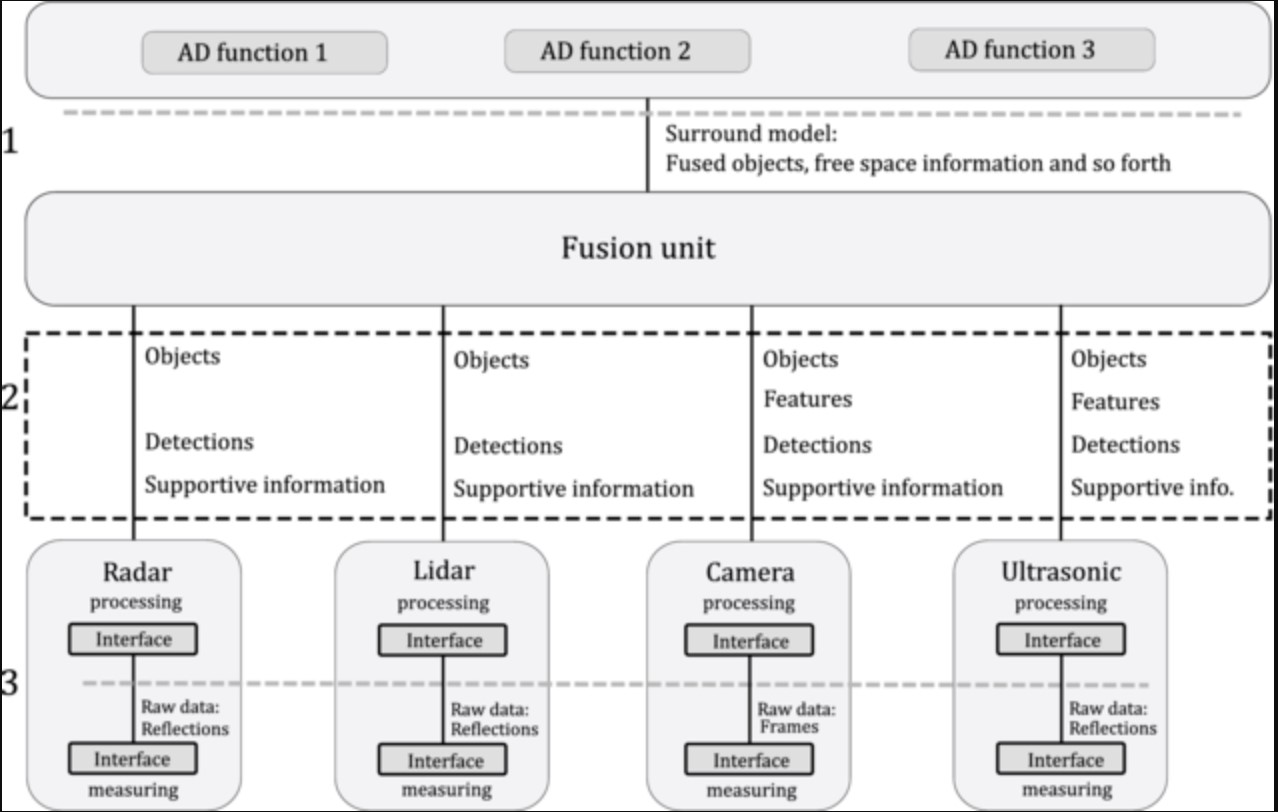 ISO 23150:2021定义了用于自动驾驶功能的传感器和数据融合单元之间的接口级2数据通信(图片:国际标准组织)
ISO 23150:2021定义了用于自动驾驶功能的传感器和数据融合单元之间的接口级2数据通信(图片:国际标准组织)
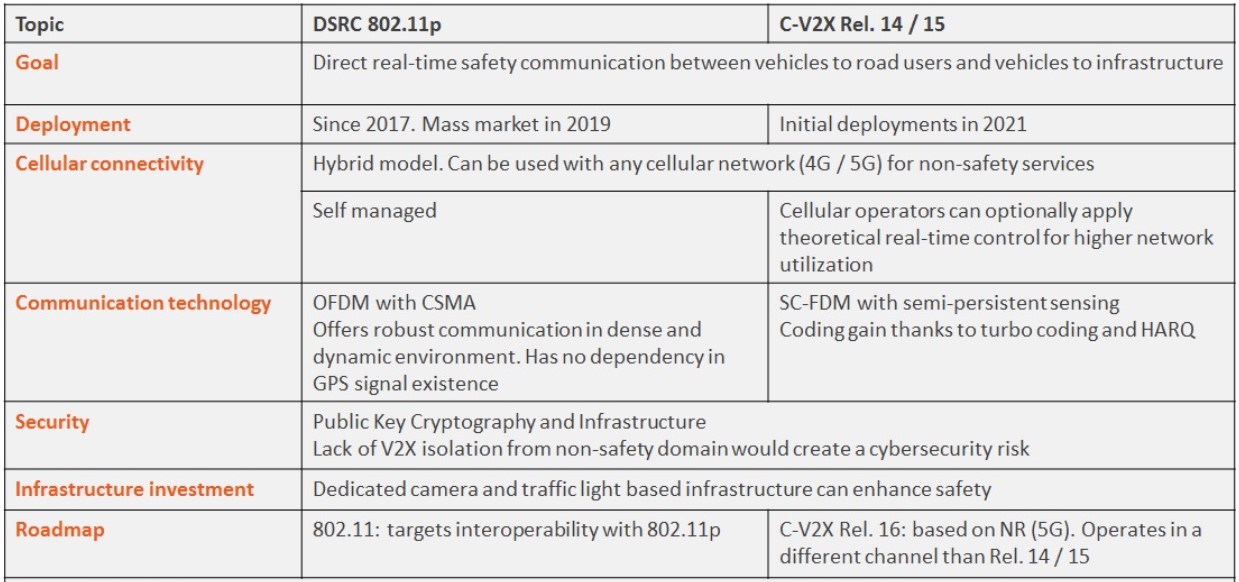
两种通信标准正在涌现,以增强车辆传感器网络;智能传输系统G5(ITS-G5)和蜂窝V2X(C-V2X)平台。其-G5已被几辆汽车制造商采用,而C-V2X已获得与道路基础设施所有者运营商和一些汽车制造商的势头。
ITS-G5是由CAR 2 CAR联盟和欧洲电信标准协会(ETSI)联合开发的。它采用专用短程通信(DSRC)技术,使车辆能够直接与其他道路用户通信,而无需移动电话或其他基础设施。ITS-G5是一个特设传感器网络,将车载传感器(如摄像机和雷达)与基于基础设施的通信网络连接起来。
还专为车辆和周围环境之间的直接沟通而设计,C-V2X是两种技术的新技术。它由3GPP基于蜂窝调制解调器技术定义,导致与DSRC的基本不同的不可互操作的访问层。其-G5和C-V2X均地址相同的用例,并正在进行一些努力来开发可互操作的解决方案。
总结
从医疗保健到自动驾驶汽车、工业系统,甚至白色家电,传感器融合技术在各个应用领域都越来越重要。它可以将来自多种传感器的测量数据汇集在一起,形成一个更完整的设备操作或自动化车辆周围环境的图像。虽然传感器融合并不是新事物,但最近有一些应用ML来改进传感器融合系统运行的努力。此外,目前正在进行标准化工作,以实现传感器融合系统在多个平台上的互操作性,进一步扩大该技术的优势。下一个FAQ将回顾传感器融合的不同级别和传感器融合架构的选择,包括如何为物联网应用构建它们。
参考文献
选择最佳的传感器融合方法:机器学习方法, MDPI
用于安全应用的DSRC与C-V2X, Autotalks
ISO 23150:2021、ISO
传感器融合,维基百科
惯性传感器位置和姿态控制使用先进的传感器融合算法,意法半导体
了下:传感器提示



