


图片学分:大阪大学
起初它看起来像一个平均的反铲,但这种双臂挖掘机实际上是日本机器人。
人们在之前尝试自动化大型机械,但缺乏精确控制,结果最佳,大阪大学研究人员在新闻稿中表示。他们正在致力于通过给运营商进行多种方式来解决这个问题来与自主挖掘机交互。无人机在天空中提供眼睛而不是板载相机,操作员还可以从机器人手臂中的力传感器接收触觉反馈。
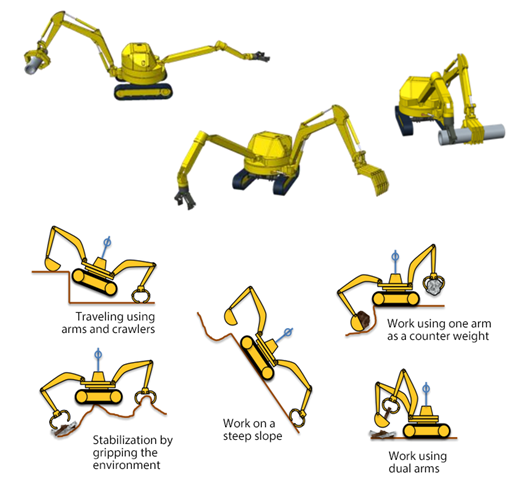
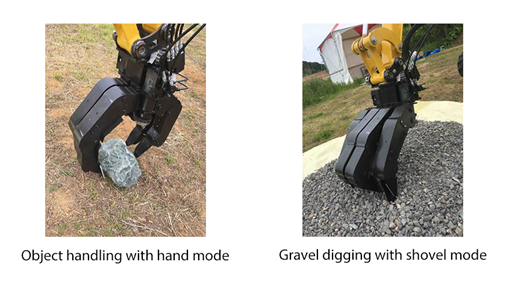
它基于2016年禁止范式挑战的设计,由颠覆性技术计划(影响)的艰难机器人挑战策划。以前的版本包含触觉反馈和无人机,但只有一只臂。在较新版本上的两个臂都旋转360度,这意味着它们都可以用于机器可能需要执行的任何任务。除了用两种可配置的“手”模式之一拾取件,臂也可以用于稳定性或配重。
研究人员预计将在实际救灾情况下部署的原型需要几年 - 它仍然需要一些“未来改进,与基本技术集成,以及性能限制测试”。
提交:基础设施



