

通过Kazuki Into,电路开发经理•东方汽车美国公司||因为步进电机在每个步进角度下运行然后停止,所以它们提供高精度的位置控制。但它们不断前进的方式会引起振动和噪音。现在,一些司机使用先进的电子设备来跟踪和控制进入电机的电流,以此实现两相微步装置的平滑运动。
步进电机应在所有转速范围内无振动。但是现实世界的步进器在低速、中速和高速运行时会振动旋转振动.这是因为转子的速度在每次移动到一个主要的步进角度之间变化。
在所有这些速度下抑制旋转振动是一个挑战,但一些设置使用步进电机的微步作为第一道防线。请记住,微步进是一种控制技术,它通过控制通过电机绕组的电流来划分电机的基本步进角度。
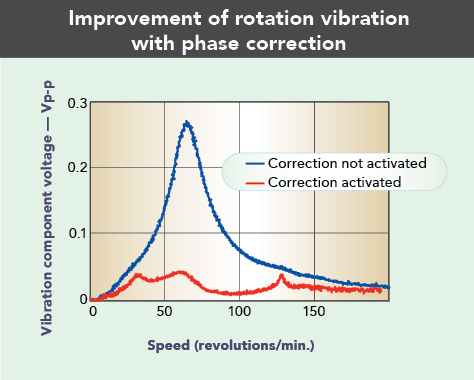
这只是控制如何解决振动的一个例子。此图显示了使用东方电机的CVD228-K和PKP266D28AA两相电机和双极驱动器包进行的相位校正。请注意激活相位校正如何显著降低峰值振动值。
减少步进角度在向前移动时有效地减少速度变化,这有助于最小化振动和电动机嗡嗡声。
不幸的是,微步通常不足以减轻所有的振动。因此,一种新的抑制振动的方法是电流控制。在这里,除了微步,微处理器跟踪和控制单独的相电流与先进的算法。正如我们将探索的,这种设计还利用了这样一个事实,即通过电机绕组精确控制电流可以使电机运行更平稳。
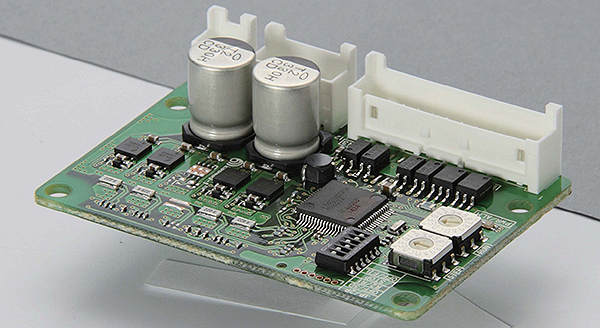
这是东方电机CVD驱动器的板安装版本。它具有直角连接器。驾驶员单独监控相电流以改善电流控制,因此它分别跟踪五种不同的电流 - 或者在两阶段驱动器的情况下,四种不同的电流。
新的步进选项放入上下文中
考虑五相步进电机技术。这种设置的一个优点是,电路可以使用全相电流检测方法,同时监测从所有五根电缆进入电机的电流。这种传统的电机输入跟踪方法只需要一个检测电路,电路简单。但这种方法无法检测到从未通过传感电路的回流电流。因此,电流控制可能变得不稳定,需要额外的驱动器功能来完全减轻振动。
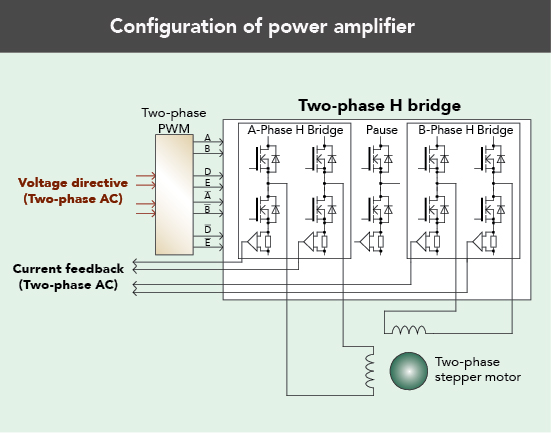
这是双相步进电机驱动器中功率放大器的配置。
新的振动抑制驱动器跟踪单独的电流相位来控制电流。他们分别检测五种不同的电流-或在驱动版本的两相振动抑制,四种不同的电流控制。在这里,驱动程序有一个微处理器运行先进的算法程序,以最大限度地扭矩与电流校正。
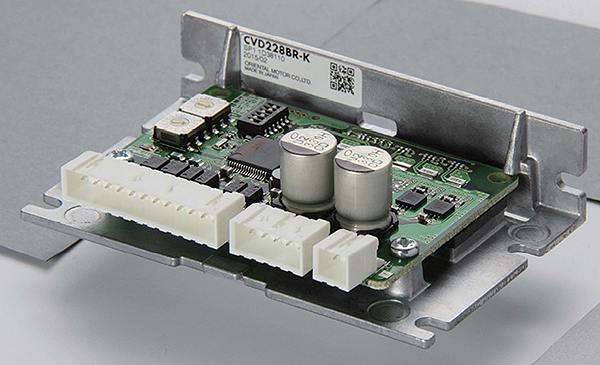
这是东方电机CVD驱动器的平板安装版本。它有并联连接器。该驱动器作为独立产品提供,或与兼容的步进电机一起包装。
通过电机的电磁型材最大化输出
请记住,当输入电流低于额定电流时,电机输出扭矩与输入电流成比例。但是考虑电流变高时会发生什么。
在这里,由于磁通量的电枢反应引起的磁饱和现象,驱动器向绕组施加超过额定电流的电流。然后,电流和转矩的关系逐渐偏离其比例。
因此,为了增加电机的输出扭矩,运动设计必须有效地利用这一范围的非比例电机响应。
新的振动抑制驱动器采用自动处理技术运行高级算法的单独相电流检测方法。这些设置对使用功能进行高级微步,以获得所有速度的平滑微踩。此外,一些振动抑制驱动器提供先进的MicroOxpping功能。
案例指出:一个专有的选择,平稳驱动,使良好的低振动操作,从微步驱动器与拨码开关上的驱动电路板轻弹。平滑驱动功能自动控制电机的微步驱动运行在相同的行程和速度在全步模式,而不使操作者改变驱动器的脉冲输入的速度设置。因此,该函数消除了增加驱动器脉冲的需要。
考虑到大多数Microstepping司机如何每次革命提供0.007°或51,200微电源步骤。相比之下,振动抑制步进器驱动器采用两相双极驱动器的形式自动微电机0.0008°或高达电机的1.8°步骤或高达2,048步。通过使能平滑驾驶功能,驱动程序可以显着提高所有速度范围的整体性能,而不仅仅在较慢的速度下 - 大幅减少可能导致步长误差的振动。这为设计工程师提供了一个更广泛的电机速度设计窗,具有设定的性能水平。
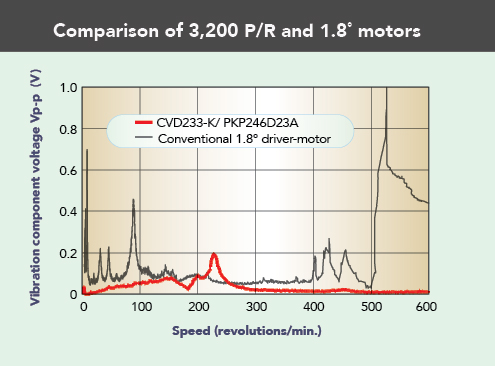
3200 P/R为每台步进电机0.1125˚。CVD振动抑制两相双极步进驱动器(运行专有的平滑驱动算法)每完整1.8°电机步进自动微步进至0.0008°或2048步。通过这种方式,平滑驱动显著提高了所有速度下的性能,而不仅仅是较低的速度范围-大大减少了可能导致阶跃误差的振动。
校正正弦电流进步进电机
另一种平滑电机输出的方法是最小化转矩脉动,即改变励磁相位时输出转矩的波动。在这里,一些算法校正进入电机的正弦电流。
如果电动机电流和产生的扭矩的关系是线性形式,则扭矩脉动不会从每个相的电流变化到正弦波。
然而,电动机电流和产生的扭矩的关系不是线性的。因此,当在正弦波的每个阶段改变电流时产生扭矩失真。当电流高时发生这种情况 - 反过来导致振动。因此处理高输出扭矩和低振动的同时需要额外的控制。
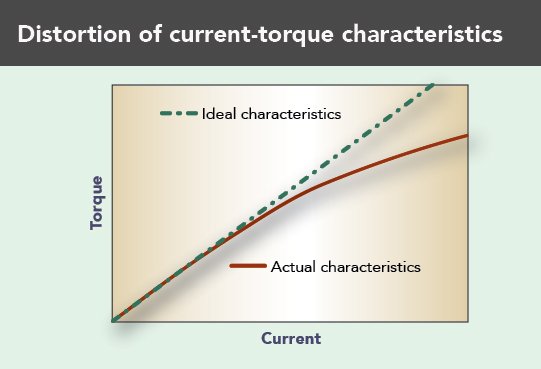
当电流变大时,施加到绕组上的电流超过额定电流(由磁通电枢反应引起的磁饱和定义)。然后电流与转矩的关系逐渐变为非比例关系。要充分利用步进电机,需要围绕这种行为设计工作。
为了解决这个问题,一些振动抑制步进驱动器适当地校正了提供给电机的正弦电流的相位,称为相控-或在关键时刻适当地切换电气相位。这些开关时间是基于在步进电机中发现的最常见的特征。由于这些特性从电机到电机都是独特的,这种驱动器使用专有的相位控制技术,以特定的电机尺寸和输入电流,以获得理想的性能。
该程序通过匹配额定电机电流和驱动电流来实现这一点。换句话说,它匹配电机的最大电流值到驱动器的最大电流-例如,一个2.8 a的电机到一个2.8 a的驱动器。这种相位控制纠正了电流-转矩特性的失真,从而在降低振动的同时保持了高输出转矩。这反过来又提高了止动位置的准确性。
激活相位校正可显著降低振动峰值值。相位校正的优化水平取决于电机的磁性能,因此校正值最好设置以满足特定的电机-驱动器组合。这就是为什么这种方法的减振严重依赖于配对良好的电机和驱动器。
东方汽车美国公司。
www.orientalmotor.com.
根据以下文件提交:运动控制提示,驱动器(步进电机)+放大器,电机•步进电机



