

微步进是一种控制步进电机的方法,通常用于在低速下实现更高的分辨率或更平滑的运动。
步进电机以谨慎的步伐前进,或以小幅度的革命前进。例如,步进角为1.8度的步进电机,每转一圈(360 ÷ 1.8),步进200步。这种谨慎的运动意味着电机的旋转不是完全平稳的,旋转越慢,由于相对较大的步长,它就越不平稳。一种方法,以缓解这种缺乏平滑在缓慢的速度是减少电机的步骤的大小。这就是微步法的用武之地。
微步进控制将每一个完整的步骤分成更小的步骤,以帮助平稳电机的旋转,特别是在缓慢的速度。例如,1.8度的步进可以被分割256次,提供0.007度的步进角(1.8 ÷ 257),或每转51,200微步。
微步进是利用脉宽调制(PWM)电压来控制电机绕组的电流。驱动器发送两个电压正弦波,90度失相,到电机绕组。当电流在一个绕组中增大时,它在另一个绕组中减小。电流的逐渐转移导致更平稳的运动和更一致的扭矩生产而不是全步或半步控制。
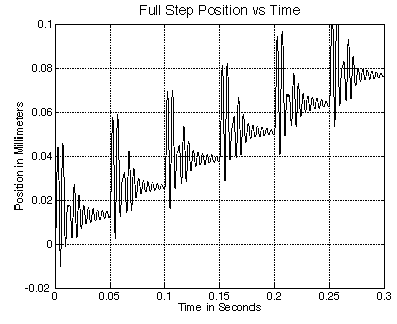
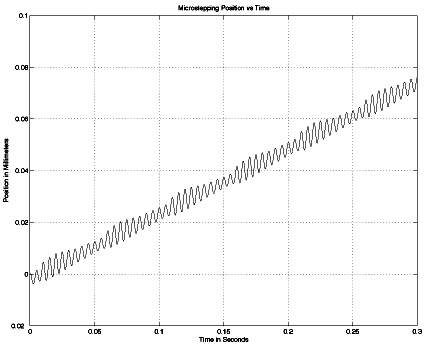
微步进显著减少了定位振荡。
图片来源:Dover Motion
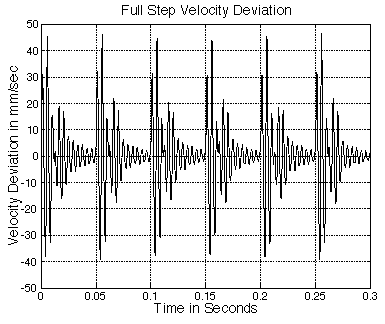
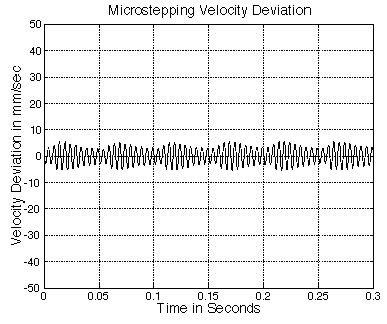
微步还可以减少速度波动。
图片来源:Dover Motion
虽然微步进控制改善了转矩产生、低速运动和共振,但控制和电机设计的限制使它们无法达到理想的特性。这主要是因为微步驱动器只能近似一个真正的正弦波,所以一些转矩脉动,共振和噪声仍然存在,尽管与全步进和半步进模式相比,每一个都大大减少了。此外,采用微步进控制的步进电机产生的转矩仅为全步进控制产生的转矩的70%左右。
微步进有时被认为是机械齿轮传动的一个很好的替代方案,因为它不会向系统引入回隙或降低系统的最大速度。然而,机械传动装置增加了电机的扭矩,并增加了其位置保持能力。
重要的是要避免有时被称为“空分辨率”的情况,在这种情况下,步骤的划分级别(即分辨率)高于系统约束的实际情况。这种情况最常发生在微步进产生的扭矩不足以克服被驱动部件(如丝杠或滚珠丝杠)的摩擦扭矩时。每微步增量扭矩由下式确定:
![]()
地点:
T公司=每个微步产生的增量扭矩
THFS中=保持力矩(全步操作)
步分比(每完整步的微步数)
对于使用256步分割比(SDR)的0.35 Nm保持扭矩的电机,每个微步产生的增量扭矩将为0.002 Nm。
![]()
![]()
如果螺杆的摩擦扭矩为0.06 Nm,则需要30微步(0.06 ÷ 0.002)才能产生足够的扭矩使螺杆移动。此外,每转多步的操作要求驱动电机的脉冲序列有更高的频率。在前面的例子中使用256 SDR意味着电机每转走51,200步或脉冲(每转200完整步x每步256微步)。在电机转速仅为每分钟100转时,所需的脉冲频率超过5兆赫兹。
图片来源:东方汽车美国公司
了下:直线运动技巧,运动控制•电机控制,电机•步进




告诉我们你的想法!