

对于许多运动控制应用,设计者和工程师可以在伺服或步进运动控制系统之间进行选择。这一决定的大部分是由电机驱动的,因此本文将专注于该组件,虽然控制器和驱动器也参加了评估。使得正确的选择具有长期利益,积极影响生产效率和总体生命周期成本,同时使错误的选择可以导致性能和维护问题。
步进器和伺服运动控制系统之间的基本差异是电动机的类型以及它是如何控制的。步进和伺服电机具有通过永磁体通电的多个磁极,或通过通过绕组的线圈进给电流。
步进电机是没有换向器的电动电动机,一种多极无刷直流电动机,可以划分全旋转,通常为50到100个相等的步骤。可以命令电机的位置以在这些步骤中的任何一个中移动和保持,而无需反馈传感器,例如编码器。虽然步进电机可以逐步准确地在它们的多个极之间移动,但是可以添加编码器以进行更精确定位。
典型的伺服电机有4到12个杆,并且很少有极点需要反馈以跟踪其位置。伺服电动机与编码器和复杂的控制器耦合,允许控制角度或线性位置,速度和加速度。通过使用称为脉冲宽度调制(PWM)的技术发送可变宽度的电脉冲来控制伺服电动机。
设计要求
通过回答这些问题来了解应用程序要求是在步进和伺服运动控制系统之间进行设计选择的第一步:
- 载荷有多沉重,以及速度如何?
- 扭矩要求?
- 是否需要扭矩限制?
- 是否需要扭矩?
- 需要定位解决方案?
- 运行速度?
- 在整个移动过程中加载是否会发生变化?
一旦回答了这些问题,以下设计考虑就会有助于指导决定。
设计考虑因素
该表比较了伺服和脚步的一些主要特征。
表:伺服和步进功能
特色 |
伺服 |
步进 |
职位反馈 |
必要 |
可选 |
扭矩vs速度 |
常数 |
改变 |
保持扭矩 |
不 |
是的 |
扭矩控制 |
是的 |
不 |
需要调整 |
是的 |
不 |
支持动态载荷 |
是的 |
不 |
低速光滑度 |
好 |
优秀 |
编程 |
复杂 |
简单 |
尺寸 |
较大 |
较小 |
位置反馈 - 伺服系统运行闭环,因此位置反馈是必需的。步进系统运行开环,其中位置命令在其中一个步骤中移动和保持,而无需任何反馈。可以将增量或多匝绝对编码器添加到步进电机应用中,以便需要更精确定位。
扭矩与速度 - 负载的重量和需要移动的速度有助于确定扭矩要求。如图1所示,伺服电动机在其速度范围内具有恒定的扭矩,而步进电机的扭矩低速且高速较低。
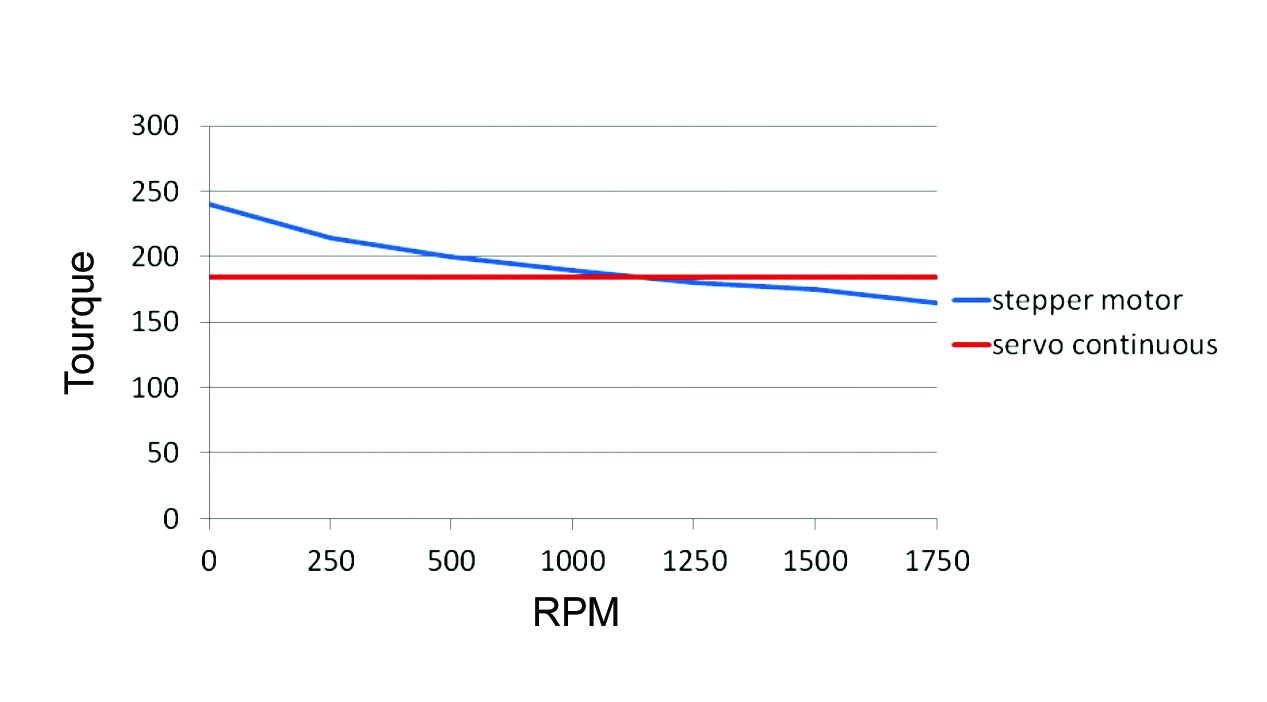
图1,扭矩曲线,由AMCI提供。步进电机的扭矩高于伺服电机,直到速度达到约1,200至1,500转。
保持扭矩 - 保持扭矩是当绕组通电时使电动机移动一个完整步骤所需的扭矩量,但转子是静止的。步进电机扭矩通常以每英寸盎司测量。步进保持扭矩可以通过静止电机的电流量(空转电流)的量来调节。在100%空转电流下,可以从电动机预期完全扭矩。伺服电机没有这种功能,与步进电机相比,在低速下为其下扭矩的因素之一。定位电动机轴可能在休息时经历轻微旋转力的应用需要保持扭矩。典型的应用需要由步进电机提供的保持扭矩包括相机,转向栅极和垂直载荷定位。
扭矩控制 - 与步进电机相比,伺服电机的电流控制是更复杂的,该电流通过伺服电机的调节有助于调节扭矩。这使伺服电机适用于必须管理扭矩的应用,例如Web控制。
调整所需 - 伺服系统需要调整,可以控制相当复杂。例如,如果负载以非常慢的速度运行,则可能在没有适当调谐的情况下发生大量振荡。步进电机的直接控制不需要调谐,导致更简单的控制。
支持动态负载 - 伺服电机可以支持动态负载,因此如果预期负载增加,伺服可以响应峰值扭矩。步进电机没有此功能。
动态负载应用程序的重量通常会改变,并且无法预测地受益于伺服电机。输送机移动可变重量产品是一个很好的例子。
低速光滑度 - 步进电机具有优异的低速平滑度,具有微步进等功能,可提供精确的速度变化,而不会使用伺服系统发现漂移和狩猎。需要低速平滑度的应用包括泵,视频扫描仪,光学测量系统和低速输送机。
编程 - 设计师和工程师经常受到编程伺服系统的复杂性的挑战。相比之下,步进系统编程更简单,通过消除隐秘编码来减少所需的设计工作。这使得能够在各种应用中快速实现。集成的PLC和步进运动控制系统使用嵌入在PLC编程软件中的用户定义的宏指令简化了应用程序,配置有拖放命令,以执行多个轴的控制,通常最多12(图2)。
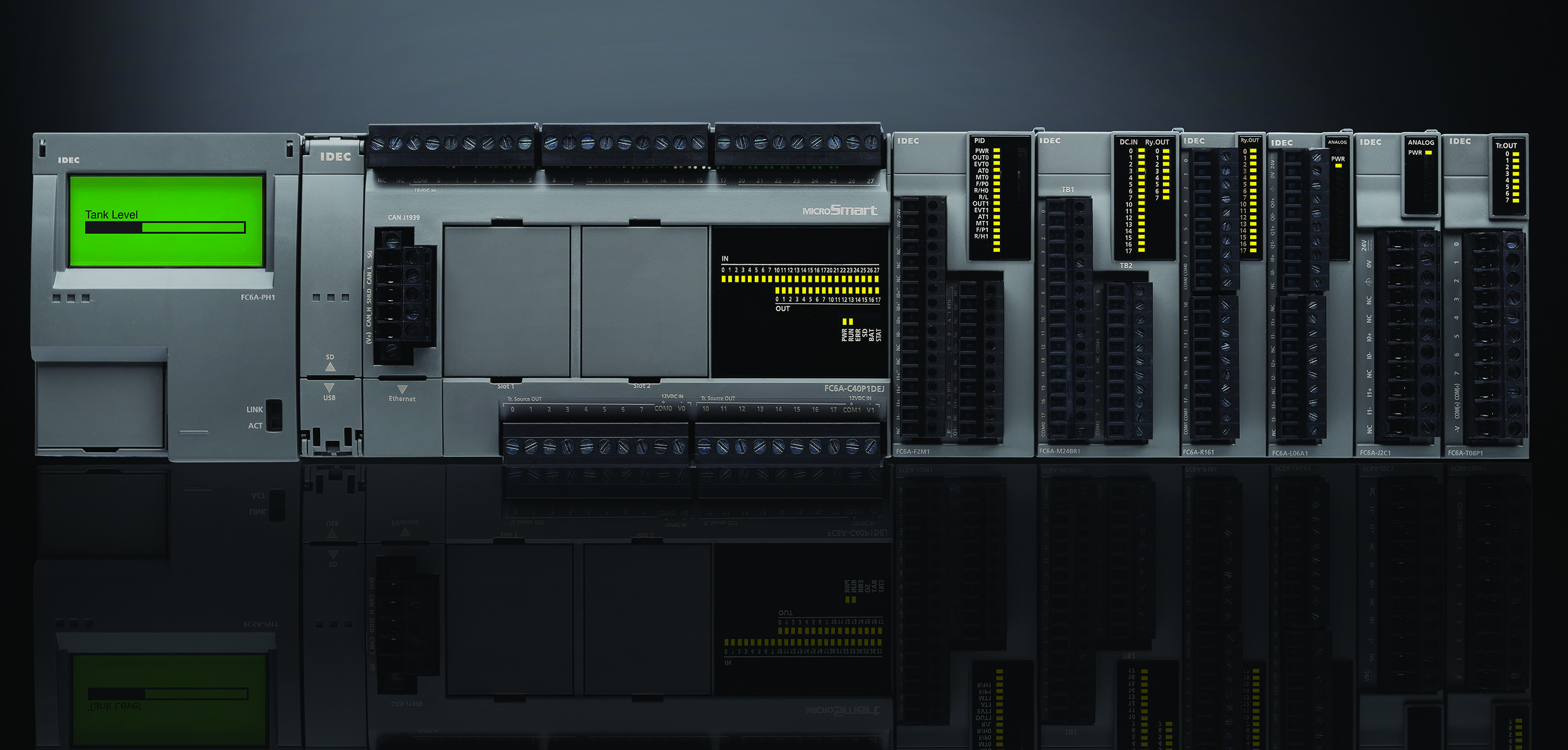
图2,FC6A PLC,由IDEC提供。此IDEC PLC配有嵌入式运动控制宏指令,允许用户快速,简单地实现单轴和多轴步进运动控制。
尺寸 - 步进电机更紧凑,伺服电机更紧凑,允许它们适合机器中的较小空间。较小的尺寸也使得步进电机,驱动器和控制器集成到一个外壳中更容易(图3)。这种独立的步进运动控制系统简化了集成和安装,减少了现场接线并节省了空间。
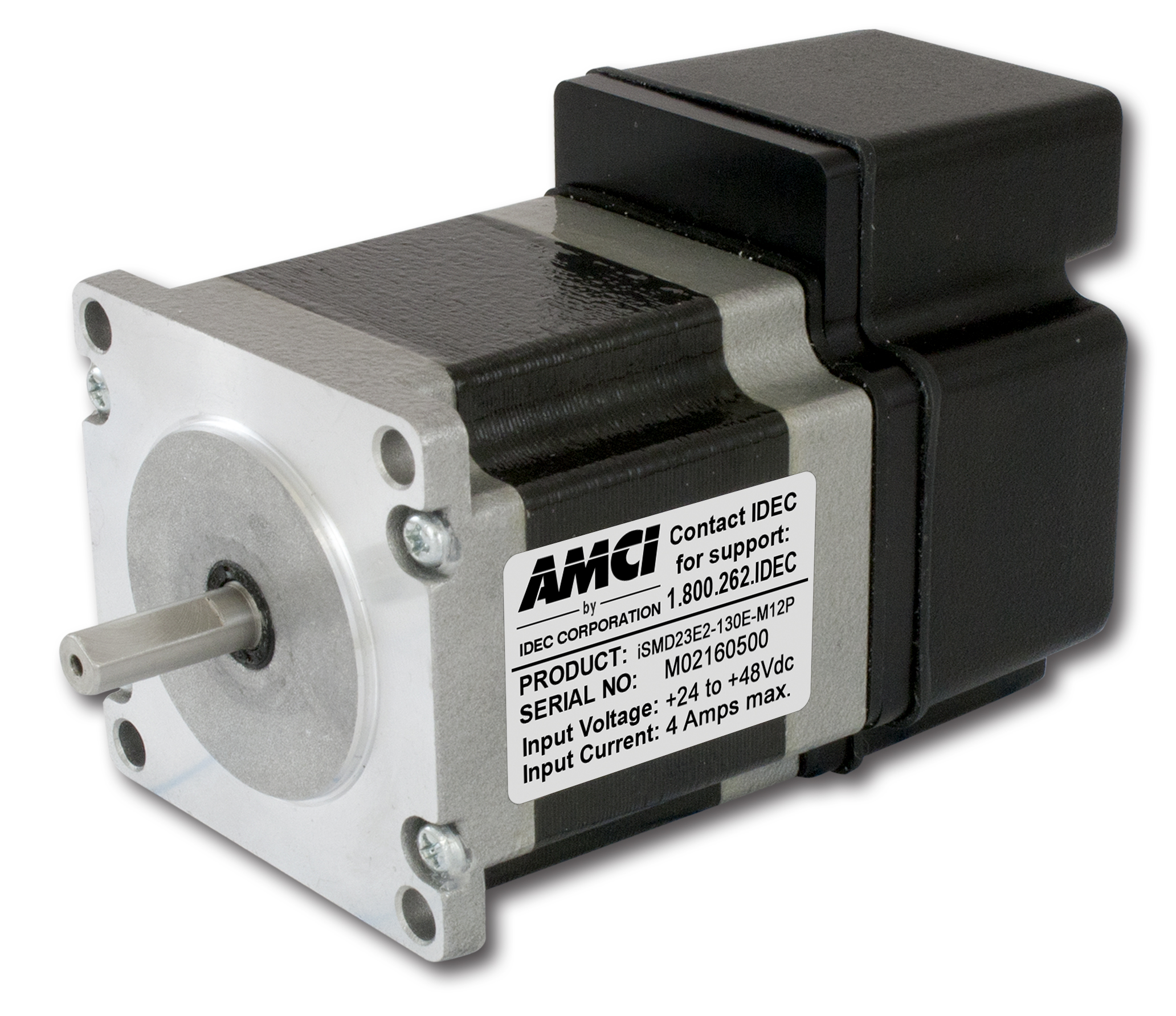
图3,集成了步进电机驱动控制器,由AMCI提供。步进电机非常紧凑,允许它们适合在机器中的小空间,或者与此处描绘的驱动器和控制器集成。
以下示例显示了步进运动控制系统如何解决填充问题。
提高油漆填充精度和重复性
主要的艺术供应商由于填充过多的涂料瓶而具有生产问题。这些问题是由于现有的气动涂料填充系统,其遭受供应空气压力的宽变化和气动缸的限制填充调节。
工程团队应用了基于步进的线性执行器来更换气动缸,步进驱动器和控制器接口到工厂现有的PLC。从PLC的命令直接发送到步进控制器并通过Modbus数字通信网络驱动。这提供了集中控制架构,以及操作员的单个接口点。
通过操作员使用现有的HMI对由步进电机控制的线性执行器的调整,从而消除了对第二用户界面的需求。设置转换是通过简单的按钮完成的,与机动系统相比需要调节气缸。用精确且可重复的步进基础致动器取代气动空气供应的可变性导致升级成本的快速回报由于欠填充的欠填充和消除由于过度填耗而消除损失的消除。
总结
与更复杂的伺服运动控制系统相比,踏步者是更简单的技术,并且不需要调整或调整。它们在低速时也具有出色的扭矩,不需要定位反馈,维护要求非常低。
当应用程序需要扭矩控制或支持动态负载时,需要伺服电机控制系统。在这些情况下,在某些高精度应用中,伺服控制的增加的成本和复杂性是必须支付的价格。
关于作者
Matthew Tellier是Motion Control Advanced Micro Controls,Inc.,Terryville,CT的产品经理。他可以在mtellier@amci.com或860-585-1254,x117到达他。
提交:驱动器(步进)+放大器那运动控制•电机控制那电机•步进



