

伺服系统通常使用三种类型的控制回路组合:电流、速度和位置。速度控制环路有两个目的——它使系统能够响应变化的速度命令,并允许系统抵抗高频负载干扰。但是速度环本身并不能保证系统在很长一段时间内保持给定的位置。这就是为什么在级联结构中速度控制回路经常与位置控制回路一起使用的原因。
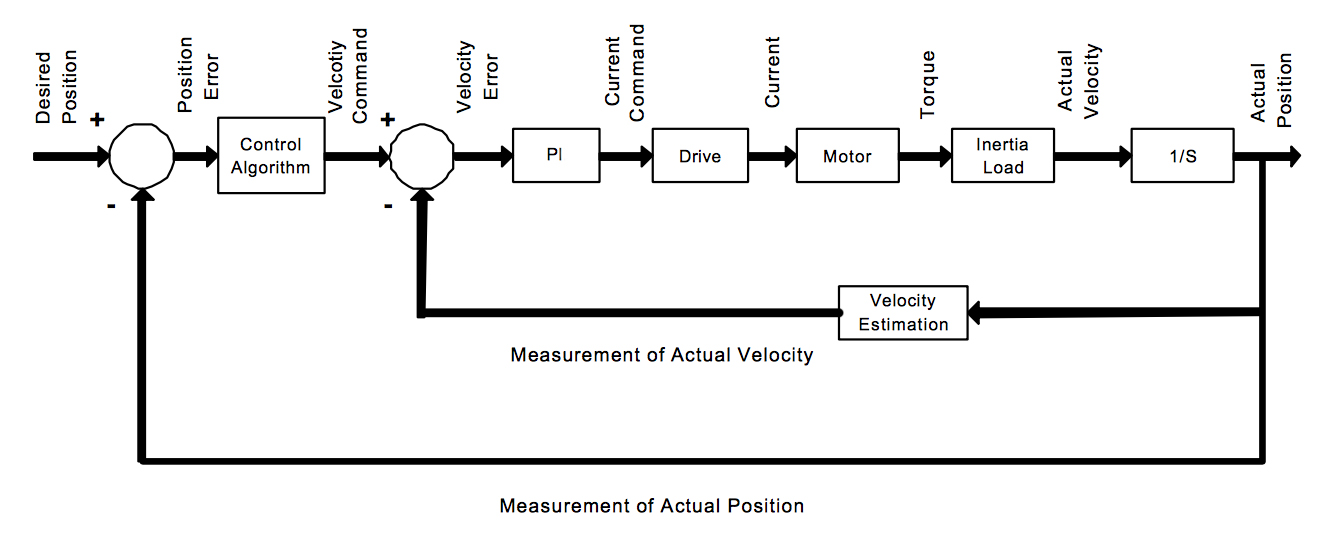
速度控制环常与位置环级联。
图片来源:Integrated Industrial Technologies, Inc。
速度控制器通常是PI控制器,使用比例K副总裁,和积分K6,而位置控制器通常只使用比例增益Kp.(请注意,当前控制通常是自动设置的,只有在极少数情况下才会手动调整。)
扼要重述以前的文章,成比例增加具有一个值,该值与误差成正比,并决定为克服该误差而施加的电压。比例增益与系统刚度有关。
积分增益随着时间的推移累积误差,并在移动结束时提供恢复力,将系统推到误差为零的点。
在级联控制回路中带宽内环的带宽应该是外环带宽的5到10倍,否则内环对外环的影响很小。最佳实践是首先调优最快的循环,因此在级联位置-速度循环中,我们从(内部)速度循环开始。
由于速度环是PI控制器,所以只有两个参数需要调整- k副总裁和K6.对于移动配置文件,使用一个中等值的速度目标(不是应用程序将经历的最低或最高),但保持相对较高的加速度。这将放大系统响应的影响,使系统更容易调优。
要开始调优序列,增加速度比例增益(K副总裁),刚好在超调发生之前.(有时增加K值是有帮助的副总裁至超调点,然后将其收回,直到消除超调。)现在增加速度积分增益(K6),直到出现少量超调(5%至15%).
在级联控制回路中,内环的性能影响下一个外环的性能。本质上,内环(速度)充当了外环(位置)的低通滤波器。
一旦调整了速度控制回路,控制器应设置为在位置模式下运行,位置回路即可进行调整。从一个较低的位置增益值(Kp),然后慢慢升高,直到发生超调之前的某个点.
现在速度和位置增益已经设置和稳定,增加目标速度并再次测试增益。如果需要,调整它们,使增益适用于整个应用程序的速度范围。
值得注意的是位置环路的输出是一个速度命令.它是这样工作的:位置环路检测到的位置误差由位置增益K缩放p,以生成速度命令。速度指令被发送到速度回路,速度回路使用它来控制更多的扭矩,从而移动电机来纠正位置误差。
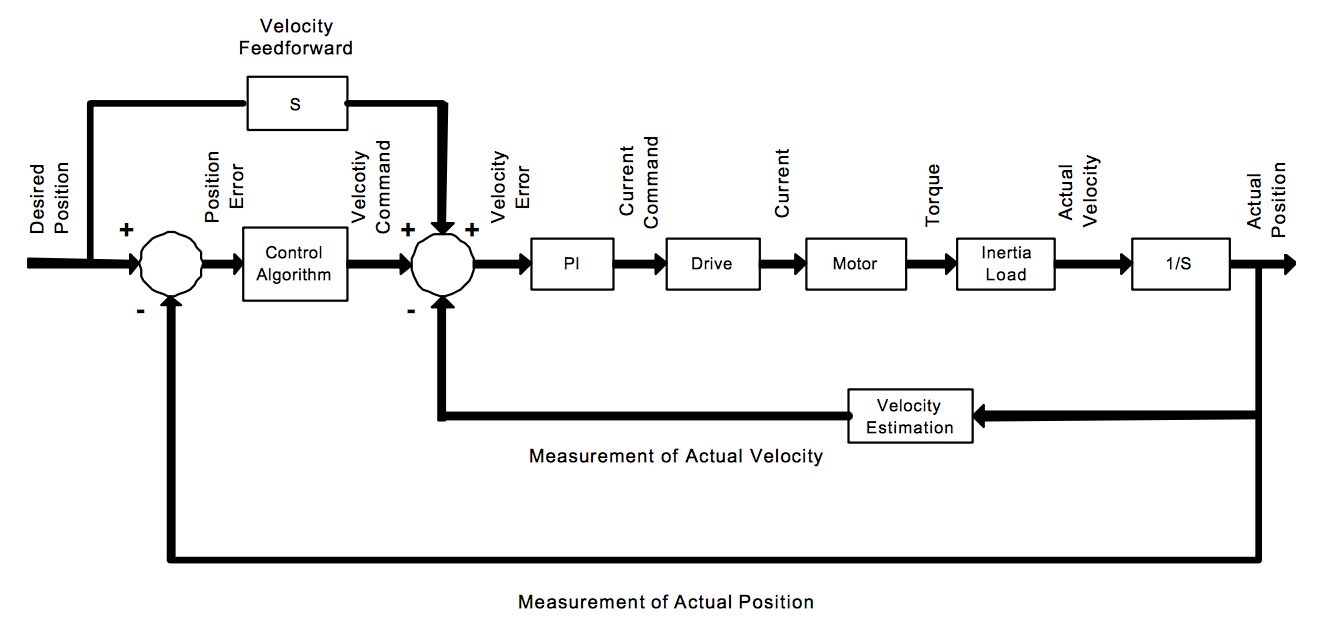
前馈控制是当跟随误差必须最小时,尽管它牺牲了系统的刚度。
图片来源:Integrated Industrial Technologies, Inc。
如果应用程序要求非常低的以下错误,可能需要添加前馈控制到调优参数。速度前馈控制(Vff)采取主动的方法,计算所需的速度,以满足所需的位置,并将此值直接馈给速度控制环路,而不是让控制环路等待位置误差的发展。然而,使用速度前馈的缺点是位置环的比例增益(Kp)必须降低,这就降低了系统的刚度。
图像来源:国家仪器公司
了下:驱动器(伺服)+放大器,运动控制•电机控制




告诉我们你的想法!