

从机器人到外科医学再到体育科学,触摸或触觉感知对一系列现实生活应用至关重要。触觉传感器以生物触觉为模型,可以帮助研究人员理解人类的感知和运动。大阪大学的研究人员现在开发了一种利用触觉成像技术测量压力分布的新方法。
压力是触摸的主要特征之一,并且可以使用触觉成像来测量兴趣对象的压力或应力分布。最常见的触觉成像方法涉及使用由压敏材料组成的传感器阵列。然而,这种阵列需要复杂的制造过程并对传感器设计的限制,因此在物品中概述了一种新方法的必要性IEEE工业电子学汇刊.
大阪大学的Osamu Oshiro说:“两个导体之间的压力直接与它们之间的电接触电阻有关。”“我们利用这种关系开发了由一对机电耦合导体组成的传感器,其中一根导体具有驱动功能,另一根执行探测功能。这种传感器不需要压敏材料,而且更容易制造。”
这一策略使通用触觉传感器的开发成为可能,用于测量接触压力分布,使用简单的导电材料,如碳涂料。该设计理念结合机电一体化技术的创新,使基于连接电极的传统导体的柔性传感器与基于层析成像的方法确定耦合导体的压力分布成为可能。
所提出的方法改进了先前的基于电阻抗断层摄影术的触觉传感技术,以提供具有高位置精度,可调节灵敏度和范围的传感器,以及相对简单的制造过程。“传感器可以使用各种导电材料来实现,包括导电织物和涂料,”Lig Author Shunsuke Yoshimoto说。“制造了片材型柔性传感器,以及通过涂布3D印刷结构的指状传感器,以说明可能的实际应用。”
灵敏度和传感范围的轻松调整和压力估计精度意味着这种触觉成像方法有望实现多用途机器人的先进控制。“这些传感器有望应用于远程设备操作和工业自动化等领域,”合著者Yoshihiro Kuroda表示。
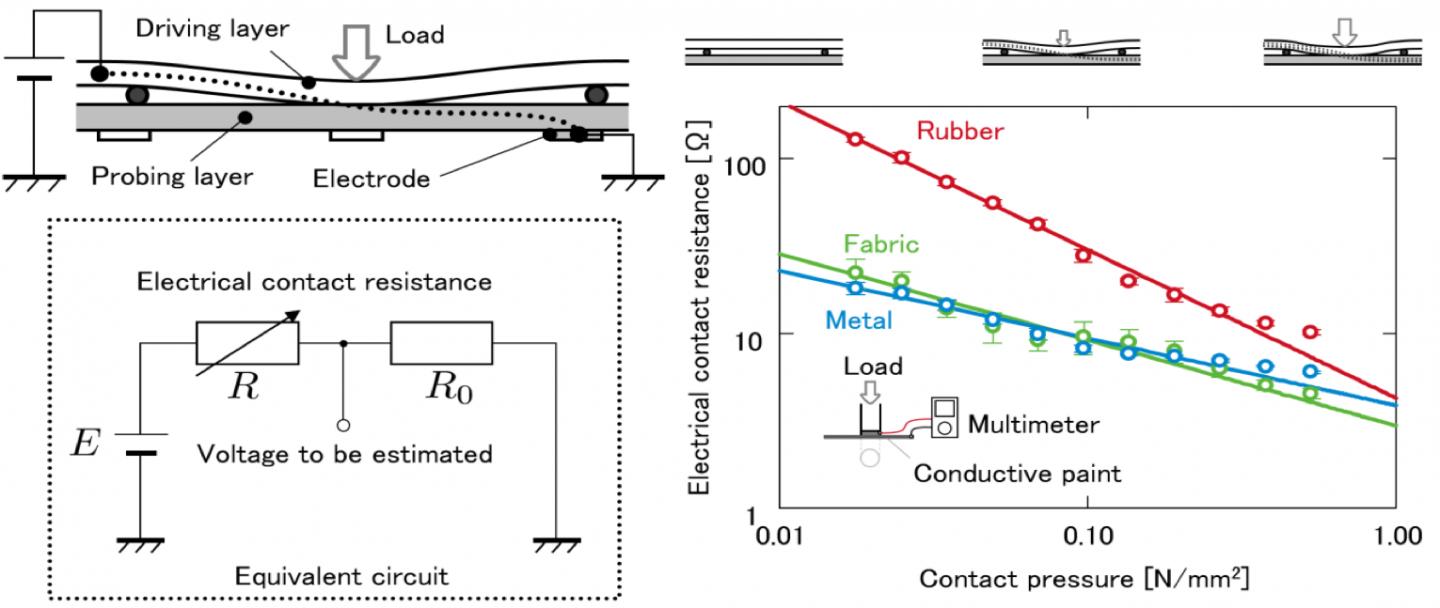
这是传感器原理和说明电接触电阻和接触压力之间的关系。(图片来源:大阪大学)
了下:工业自动化



