

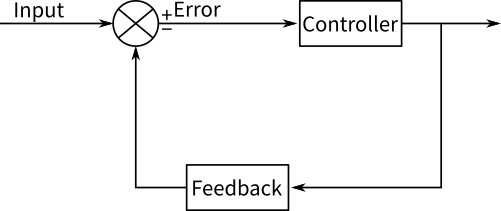
负载位置控制是闭环步进电机控制的形式。
这是真的,步进电机可以运行开环-因为他们不需要基于传感器反馈的控制器校正。因此,步进电机电路更简单,电机易于实现,但如果在应用中出现任何问题,开环步进器不会响应新的条件。相反,闭环控制让设计人员使用反馈数据来纠正错误。
传统闭环步进控制
基于步进的设计中最基本的闭环反馈只是警告错过的步骤或失速。在稍微复杂一点的设置中,驱动对电机微步进行步进损失补偿。控制产生方向和电流脉冲命令,使电机跟踪目标移动。在编码器的帮助下,控制检测错过的步骤,并自动插入补上步骤。读常见问题:什么是步进驱动器,他们如何工作?为更多的信息。
一些注意事项:在所有主动操作的全电流输入,使步进电机运行在此控制下运行热。某些脉冲trans能激发运动共振。最后,当负载要求大于拉出扭矩时,输出扭矩消失。
更高级别的闭环步进控制
稍微更复杂的是负载位置步进电机控制。利用这种闭环位置控制,反馈可以帮助驱动MicroStep电机跟踪目标移动(并保持稳定轨迹),即使在负载变化时也是如此。包含这种控制的设计必须解决拉出扭矩,谐振和热问题(任何基于基于步进的系统),而是驱动MicroSteps带有方向和电流脉冲命令的电机。更具体地,控制器监视系统位置并不断更新a移动配置文件使电机轨道目标移动。
闭环位置控制在更复杂的无刷伺服电动机控制上的优点是步进电动机更好的扭矩;更精细的分辨率;和较低的成本和复杂性。虽然它们不能取代精密应用中的伺服电机,但负载位置步进电机设计也比简单的步进电机控制设置更可靠。它们是必不可少的,在错过的步骤或重启将降低生产产出或将机械造成损坏的风险。

步进电机全伺服控制
尽管全面的回顾超出了本FAQ的重点,请注意一种步进控制类型比负载位置控制更复杂——全伺服控制。在这里,编码器跟踪电机轴,让控制磨练电流矢量,以得到跟踪目标移动的设计。然后控制使驱动器施加电流,使电机表现为一个高极数无刷电机。这样,用PID位置环(而不是额外的步骤)控制电机转矩,使电机跟踪目标移动。更重要的是,驱动器输出可变电流水平,所以电机只得到它需要的位置目前的负载…没有更多或更少。其优点包括全扭矩控制;能够协调多个轴和跟踪更复杂的运动轮廓;更紧密和更安静的操作。
有关更多信息,请阅读:
![]()
了下:运动控制提示,驱动器(步进器)+放大器



