

编码器是一种测量位置的设备,在某些配置下,还可以测量方向。旋转编码器测量轴的转动,线性编码器测量移动的距离。对于这两种类型的编码器,位置测量可以是增量的或绝对的。增量式编码器测量位置的变化,但不跟踪实际位置。当电源中断时,增量编码器失去其位置参考,必须通过重新定位序列到参考点重新开始。另一方面,绝对编码器通过给每个位置分配一个唯一的数字值来跟踪绝对位置,无论是轴的旋转还是直线旅行。因此,即使失去电源,绝对编码器将知道轴或线性驱动器的确切位置。
增量式编码器的工作原理是每转(PPR)或每距离(PPR -每毫米脉冲或PPR -每英寸脉冲)产生特定数量的等间距脉冲。当使用一组脉冲或输出通道时,编码器只能确定位置。但大多数增量编码器使用正交输出,它由两个通道组成,通常称为通道A和通道B,它们相差90度。正交输出允许编码器通过确定哪个通道是前,哪个通道是后,来感知方向。一些增量式编码器也会产生带有单个脉冲的第三通道,通常称为通道Z或通道i。这个通道用作寻的索引或参考位置。
对于求积输出,可以使用三种类型的编码:X1、X2或X4。这些编码类型之间的区别只是在移动过程中计算哪个通道的哪个边,但它们对编码器分辨率的影响是显著的。
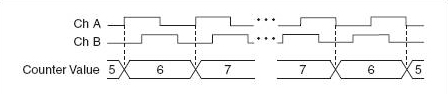
使用X1编码,通道A的上升(即领先)或下降(即跟随)边被计数。如果通道A引导通道B,则计算上升边,并且运动是向前的,或顺时针的。相反,如果通道B引导通道A,则计算下降边,并且移动是向后的,或逆时针的。
采用X2编码时,对通道A的上升边和下降边都进行计数。这使每次旋转或线性距离所计算的脉冲数加倍,从而使编码器的分辨率加倍。
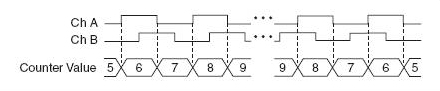
X4编码更进一步,计算通道A和B的上升边和下降边,使脉冲数量增加4倍,分辨率提高4倍。

对于旋转编码器,位置的计算方法是将计算的边数除以每旋转一次的脉冲数和上面描述的编码类型(1、2或4)的乘积,然后将结果乘以360以得到运动度。
![]()
x =编码类型(X1, X2,或X4)
N =每轴转数产生的脉冲数
对于线性编码器,位置的计算方法是将计算的边数除以每转脉冲数与编码类型的乘积。然后将这个结果乘以每毫米(或每英寸)脉冲的倒数。
![]()
![]()
PPM =每毫米脉冲数
PPI =每英寸脉冲数
增量编码器是一个相对简单和便宜的反馈选择的应用程序后,重新回家的功率损失是不有害的过程。通过正交输出,增量编码器可以实现高分辨率,甚至在高速下。
主要形象:国家仪器公司
![]()
了下:运动控制技巧,编码器•线性,编码器(旋转)+分解器,运动控制•电机控制



