

可变频率驱动器由三个主要部分组成:a整流器,将所提供的交流电压转换为DC;DC总线,存储直流电压;和逆变器,可将直流电源转换回电动机所需的电压和频率。
最常见、最简单的整流器设计使用二极管在美国,每相电源需要两个二极管,一个在电压为负时允许电流通过,另一个在电压为正时允许电流通过。因此,三相系统需要六个二极管来组成整流器。这种设计通常被称为6脉冲整流器,因为它以6个脉冲从交流源吸取电流。由于从电源输出的电流不是一个平滑的正弦波,VFD被认为是一个非线性负载。
这种非线性电流会扭曲所提供的交流电源,给电机和其他电子设备造成问题。失真的程度取决于供电电路的容量。如果整流器占电源可用容量的很大百分比,那么畸变就会很大。
失真可以建模为基础电压(即60hz)的倍数的附加电压波形。这些额外的波形从5的倍数开始,但是(对于三相系统)跳过所有3的倍数。这被称为谐波失真,对于典型的60hz系统,5TH.,7TH., 11TH.和13.TH.和声是最普遍的。
谐波失真的测量被称为总谐波失真(THD):
在哪里:
我H.=电压谐波分量或电流谐波分量的幅度
我1=基本电压或基本电流的幅度
与上述6脉冲整流器,5TH.和7TH.订单谐波是重要的,通常需要过滤。减少交流驱动器中THD的一种方法是使用12-,18°或甚至24脉冲整流器。
电动机中的谐波电流会增加磁滞损耗和涡流损耗。这些损耗提高了电机的工作温度,从而降低了电机的性能,降低了电机的寿命。
12脉冲整流器使用并联(12二极管)的两个6脉冲整流器来馈送公共直流总线。具有一个初级和两个次级绕组的变压器在两个电流波形之间产生30度相位偏移,从而消除了5TH.和7TH.谐波和降低电流THD到10%到15%之间。12脉冲整流器的缺点是成本-由于需要特殊的变压器-和物理足迹。
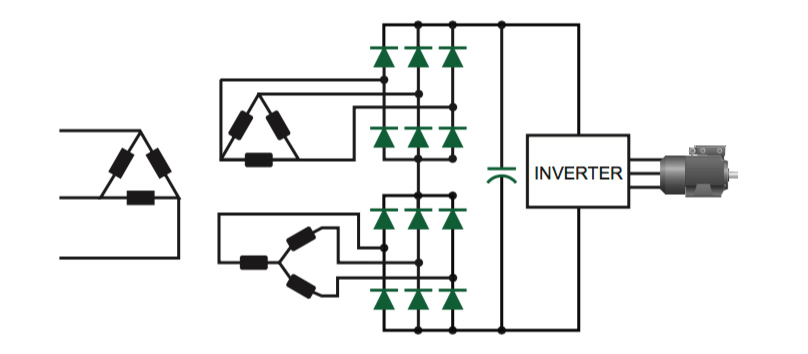
12脉冲整流器图,由两个6脉冲整流器以及一个初级变压器和两个次级变压器组成。
图像信用:艾默生工业自动化
类似地,18脉冲整流器使用三个6脉冲整流器(18二极管)和具有一个初级绕组和三个凹部的多相变压器。多绕组工作以将电压波形偏移20度。这取消了5TH.,7TH., 11TH.和13.TH.谐波并提供当前的THD,范围为5%。但随着变压器变得更复杂并且增加了额外的整流器,成本和足迹进一步增加。
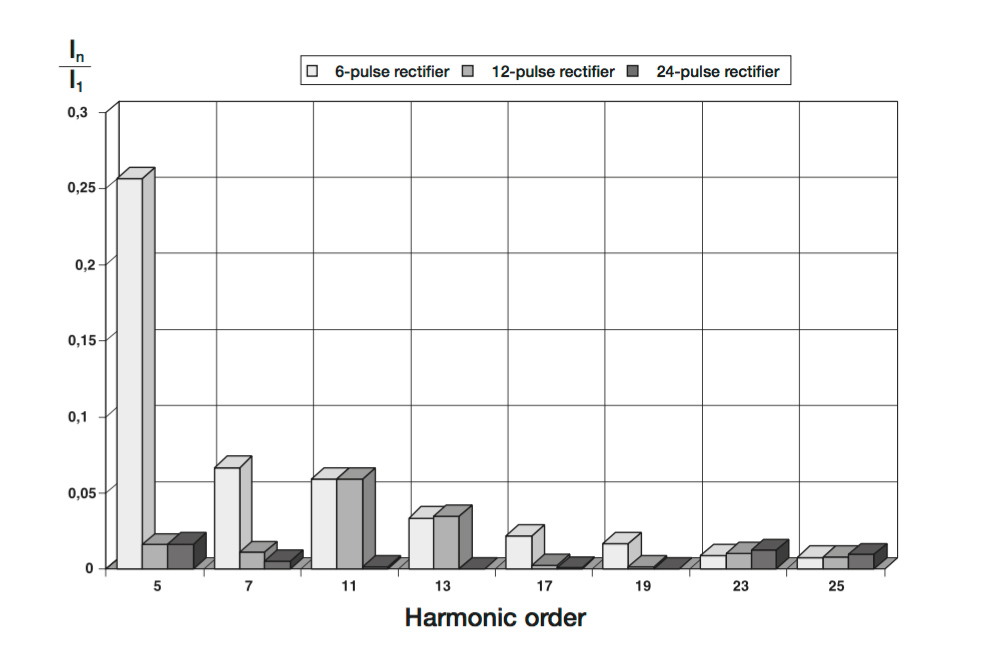
6-,12-和24脉冲整流器的谐波失真水平的比较。
图credi: ABB
消除几乎所有的谐波都需要一个24脉冲整流器,其由两个平行的两个12脉冲整流器组成,两个3绕组变压器组成。变压器提供15度的电压波形偏移,这取消了大多数低频谐波。然而,24脉冲整流器的高成本仅为非常高功率的驱动器或大型多驱动系统而实用。
提交:运动控制技巧那运动控制•电机控制



