

经过Jeff Smoot, VP运动控制,CUI Inc。
电容换向可以加快无刷直流电机的组装,比传统的霍尔传感器更准确。
检查一个无绳电源工具或计算机硬盘驱动器,你可能会发现一个无刷直流电机(BLDC)做的工作。近年来,无刷直流电机由于其高扭矩和简单的拓扑结构而得到了广泛的应用,无需石墨刷向电机绕组交换功率。
BLDC电机用传感器更换刷子换向器和执行相同功能的开关电子设备。其中呈现潜在问题:设置并对准换向所需的传感器可能是耗时的。
然而,最近的传感技术的进步已经简化了换向器设置过程。具体地,基于电容感测原理的旋转编码器可以感测转子位置以用于换向目的。这些传感器比传统上用于换向的霍尔效应传感器更简单。它们还具有优于无传感器方法的优势,有时用于换向。要了解原因,我们将审查大型BLDC换向的一些基本思想,并解释电容如何作为传感电机轴位置的机制。
变换的基本知识
作为一个快速回顾,无刷直流电动机的绕组分布在定子周围,使它们依次通电以旋转转子轴。最常见的无刷直流电机配置通常采用三个定子相,彼此相隔120电气度。电机驱动产生的电压波作用于绕组系统的有功相位,使得定子磁链和转子磁链之间的夹角保持在接近90°,这是产生最大转矩的必要条件。因此,控制器需要一些方法来确定相对于定子线圈的转子方向。
传统的传感转子方向的方法已经使用霍尔效应传感器安装在转子和定子之间的气隙中。三个霍尔传感器(用于三相电动机)检测通过转子磁铁的磁场。每个传感器输出高电平为180°的电旋转和另一个180°的低电平。三个传感器彼此相对偏移60°。切换电流以每60个电旋转度的仅两相的流程的过程称为电子换向。在最常见的情况下,三相逆变器为电机供电,并且通过来自霍尔传感器的信号触发切换动作。当传感器正确对齐时,可以将其输出解码为必要的三相切换序列。
重复完成转子轴的单匝电循环的数量是由转子极对的数量决定的。每个转子极对完成一个电气循环。电循环/旋转的数量等于转子极对的数量。
然而,当BLDC不用于定位时,可以在某些应用中消除对换向传感器的需求。在无传感器换向中,特殊算法测量电动机反向EMF作为转子位置的指示。一个警告是,当负载仅缓慢或根本不相差或至少以可预测的方式变化时,该方案最有效。
无传感器换向使用的事实,在励磁的无刷电机,不是所有的相绕组传导同时。非导电性绕组携带反电动势。此外,每个定子相的电感也有细微的差别。因此,每个阶段携带的电流都有变化。这种电流响应的变化包含转子位置的信息,可用于换向。
例如,一种最简单的反电动势传感方法是基于检测反电动势在非激励相位过零的瞬间。这个过零启动一个定时器,用来触发下一个连续的逆变器换相,因此它发生在时间间隔的结束。
当然,back-EMF方法存在限制其使用的复杂性。一个是反电动势与速度成正比。因此,当电机静止时,反电动势为零,因此没有反电动势的感觉。类似地,当反电动势在低速时过零时,可能很难感知转子位置,这阻碍了这种方法的性能。有办法绕过这些困难,但无传感器换向今天的应用仅限于那些不涉及定位。这也是一个研究课题。
比较传感器的换向设置
BLDC电机使用基于传感器的换向方法可能会或可能不使用霍尔效应传感器这样做。有时可以使用电机编码器上的换向轨道进行换向。换向轨迹输出了从霍尔传感器获得的模拟信号。
还记得普通的三相电动机通常使用三个霍尔器件,分开120°,以与三个电动机相一致。霍尔设备的标称精度为±1至3°。但是,霍尔设备的准确性成为高极计数电动机的潜在问题,其中电视度与机械程度的比率随着极数而上升。虽然每次革命中从未超过360个机械程度,但电视数量是杆对数量为360倍的产物。霍尔设备的标称精度具有更大数量的杆子。这是关键的,因为换向定时的精度会影响电机效率。
因此,霍尔设备最适用于通常用于高速低扭矩应用的低极数电机。高杆计数电动机是慢速,高扭矩的装置。他们不是霍尔换页的好候选人,因为它们遭受显着的能量损失,因为换向信号精度降低。
无论杆数计数如何,都必须准确地定位在电机外壳中。在手动优化霍尔传感器对准的情况下,优化过程可能是耗时的。它通常涉及使用第二电动机转动主电动机,而技术人员在示波器上显示反电动势信号,检查正弦波形的零交叉点是否对应于U换向信号的上升沿。这往往是一个迭代过程。
虽然霍尔设备更便宜,但相当大的对准时间增加了劳动力成本。额外成本通常导致最终产品比包含编码器的最昂贵更昂贵。
另一种方法用于换向电流的无刷直流电机是与编码器。例如,光学编码器比霍尔器件精确得多,但它们的成本也更高。编码器的另一个好处是产生增量编码器输出,可用于运动控制系统的位置,速度,距离计算的其他地方。
利用编码器,换向信号由编码器内的玻璃或金属盘上蚀刻的图案产生。然而,这种方式产生的换向信号仅适用于一个电机配置。必须针对有问题的电机进行优化。并且有一些关心涉及安装编码器。留在光盘上的手指油可以偏转光并导致后续数据错误。还需要反向EMF夹具来对准和检查编码器对齐。最后,编码器与电动机轴位置的机械对准通常涉及在视觉上跟踪编码器轮毂上的机械零位置标记或通过示波器的电跟踪。任何一种方法都可以耗时。
相比之下,用于换向的电容式旋转编码器可以比霍尔效应传感器更精确,比光学编码器便宜,并且比光学更粗糙。通过使用微控制器和内置ASIC将其与电机和对准配合的设置过程简化了数字设置零位置,极限计数和换向角度。
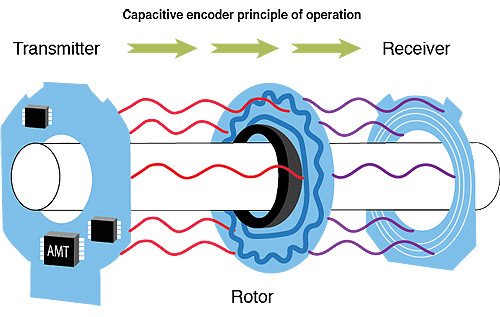
为了读取轴位置,电容式换能器使用编码器盘,该编码器盘调制发射机盘和接收器盘之间的电极之间的电容耦合。在发射器和接收器板之间的旋转磁盘耦合的导电段耦合高频(约10MHz)信号。从发射器板的不同部分耦合的信号的相对幅度取决于盘的位置,因此用作测量轴位置的装置。ASIC使用该幅度信息来计算每个测量周期的传感器位置。ASIC上的附加计算创建了与光学编码器类似的旋转运动的连续模型和类似于光学编码器的旋转运动。
具体来说,接收器上的同步检测器和低通滤波器去掉10 mhz载波,留下幅度调制,从而产生一个大约10 kHz的有效正弦信号。它的相位是编码器盘的角位置的度量。接收器上的其他电路检测这个信号的零点交叉。结果信息用于记录过零时的计数。计数成为编码器盘角位置的数字度量,从而产生轴位置的数字表示。
专门设计的ASIC芯片还可以调整16个不同值的正交分辨率从2,048到48 ppr。
最终要注意的是,电容式编码器通过解析其4,096个绝对位置来产生其换向信号,以容纳用户的杆对数的数量。这在电机选择中提供更广泛的灵活性,光学编码器无法提供更高的开关精度。
崔公司
www.cui.com
提交:运动控制技巧那编码器•光学那编码器(旋转)+ respvers



